
最新刊期
2021 年 第 26 卷 第 5 期
-
 摘要:参与介质在现实世界中广泛存在,光线在参与介质中的传播过程比在表面上的传播过程更加复杂,比如在高度散射参与介质中会发生成千上万次反射、在低散射参与介质中由于表面聚集出现体焦散效果,从而使得光线的模拟过程非常耗时。目前常用的方法包括点、光束和路径统一模型法(unifying points,beams and paths,UPBP)以及流型探索梅特罗波利斯光线传递方法(manifold exploration Metropolis light transport,MEMLT)等,这些方法在一定程度上改进了原有方法,但是在一些特殊情况下仍然需要很长时间才能收敛。本文介绍几种针对均匀参与介质的高效渲染方法。1)基于点的参与介质渲染方法,主要通过在参与介质内分布一些点来分别加速单次、二次和多次散射的计算,在GPU (graphics processing unit)实现的基础上,最终达到可交互的效率,并且支持对任意的均匀参与介质的编辑。2)基于多次反射的预计算模型,预计算出无限参与介质中的多次散射分布,通过分析光照分布的对称性,将该分布的维度从4维减低为3维,并且将该分布应用到多种蒙特卡洛渲染方法中,比如MEMLT、UPBP等,从而提高效率。3)参与介质中的路径指导方法,通过学习光线在参与介质中的分布,该分布用SD-tree (spatial-directional tree)来表示,与相位函数进行重采样来产生出射方向。以上3种方法分别从不同角度加快了参与介质的渲染效率。关键词:参与介质;渲染;蒙特卡罗方法;路径指导;基于点的渲染方法;多次散射;综述;进展128|155|3更新时间:2024-05-07
摘要:参与介质在现实世界中广泛存在,光线在参与介质中的传播过程比在表面上的传播过程更加复杂,比如在高度散射参与介质中会发生成千上万次反射、在低散射参与介质中由于表面聚集出现体焦散效果,从而使得光线的模拟过程非常耗时。目前常用的方法包括点、光束和路径统一模型法(unifying points,beams and paths,UPBP)以及流型探索梅特罗波利斯光线传递方法(manifold exploration Metropolis light transport,MEMLT)等,这些方法在一定程度上改进了原有方法,但是在一些特殊情况下仍然需要很长时间才能收敛。本文介绍几种针对均匀参与介质的高效渲染方法。1)基于点的参与介质渲染方法,主要通过在参与介质内分布一些点来分别加速单次、二次和多次散射的计算,在GPU (graphics processing unit)实现的基础上,最终达到可交互的效率,并且支持对任意的均匀参与介质的编辑。2)基于多次反射的预计算模型,预计算出无限参与介质中的多次散射分布,通过分析光照分布的对称性,将该分布的维度从4维减低为3维,并且将该分布应用到多种蒙特卡洛渲染方法中,比如MEMLT、UPBP等,从而提高效率。3)参与介质中的路径指导方法,通过学习光线在参与介质中的分布,该分布用SD-tree (spatial-directional tree)来表示,与相位函数进行重采样来产生出射方向。以上3种方法分别从不同角度加快了参与介质的渲染效率。关键词:参与介质;渲染;蒙特卡罗方法;路径指导;基于点的渲染方法;多次散射;综述;进展128|155|3更新时间:2024-05-07 -
 摘要:布料仿真一直是计算机动画中的研究热点与难点,对提高计算机动画质量以及用户体验具有重要意义,布料是一种非常经典的柔性材料物体,遍布于人们的日常生活中。虚拟世界中虚拟角色强烈的视觉真实感主要来源于逼真的虚拟人物的服装动画,这在很大程度上可以增强用户的体验感,在游戏娱乐、电影电视和动画制作等领域有着十分广泛的应用前景。布料仿真的质量与速度直接决定了计算机动画的整体水平,而布料的模拟水平则起着至关重要的作用。随着计算机软硬件的不断发展和计算机动画市场需求的提高,对布料仿真建模方法的研究受到越来越多的关注,布料仿真建模方法也因此有了较大发展。本文通过回顾布料仿真建模方法的相关工作,对国内外方法的研究进展进行综述,从布料仿真中数值积分方法的改进、多分辨率网格的改进和机器学习方法的使用等方面对布料仿真方法的发展进行简要阐述,并根据不同方法在布料模拟应用上的特性,对几大类改进方法进行了相应的总结与展望。同时选取几种算法进行对比,并给出建议。关键词:虚拟仿真;布料仿真;积分方法;多分辨率网格;机器学习;进展232|288|1更新时间:2024-05-07
摘要:布料仿真一直是计算机动画中的研究热点与难点,对提高计算机动画质量以及用户体验具有重要意义,布料是一种非常经典的柔性材料物体,遍布于人们的日常生活中。虚拟世界中虚拟角色强烈的视觉真实感主要来源于逼真的虚拟人物的服装动画,这在很大程度上可以增强用户的体验感,在游戏娱乐、电影电视和动画制作等领域有着十分广泛的应用前景。布料仿真的质量与速度直接决定了计算机动画的整体水平,而布料的模拟水平则起着至关重要的作用。随着计算机软硬件的不断发展和计算机动画市场需求的提高,对布料仿真建模方法的研究受到越来越多的关注,布料仿真建模方法也因此有了较大发展。本文通过回顾布料仿真建模方法的相关工作,对国内外方法的研究进展进行综述,从布料仿真中数值积分方法的改进、多分辨率网格的改进和机器学习方法的使用等方面对布料仿真方法的发展进行简要阐述,并根据不同方法在布料模拟应用上的特性,对几大类改进方法进行了相应的总结与展望。同时选取几种算法进行对比,并给出建议。关键词:虚拟仿真;布料仿真;积分方法;多分辨率网格;机器学习;进展232|288|1更新时间:2024-05-07
学者观点

-
 摘要:本文是关于中国图像工程的年度文献综述系列之二十六。为了使国内广大从事图像工程研究和图像技术应用的科技人员能够较全面地了解国内图像工程研究和发展的现状,有针对性地查询有关文献,且向期刊编者和作者提供有用的参考,对2020年度图像工程相关文献进行了统计和分析。具体是从国内15种有关图像工程重要中文期刊在2020年发行的共154期上所发表的2 785篇学术研究和技术应用文献中,选取出813篇属于图像工程领域的文献,并根据各文献的主要内容将其分别归入图像处理、图像分析、图像理解、技术应用和综述评论5个大类,然后进一步分入23个专业小类(与前15年相同),并在此基础上分别进行各期刊与各类文献的统计和分析。根据对2020年统计数据的分析可以看出:图像分析方向当前得到了最多的关注,其中目标检测和识别、图像分割和边缘检测、人体生物特征提取和验证等都是研究的焦点。另外,遥感、雷达、声呐、测绘以及生物、医学等领域的图像技术开发和应用最为活跃。总的来说,中国图像工程在2020年的研究深度和广度还在继续提高和扩大,仍保持着快速发展的势头。综合26年的统计数据还为读者提供了更全面和更可信的各研究方向发展趋势的信息。关键词:图像工程;图像处理;图像分析;图像理解;技术应用;文献综述;文献统计;文献分类;文献计量学48|97|5更新时间:2024-05-07
摘要:本文是关于中国图像工程的年度文献综述系列之二十六。为了使国内广大从事图像工程研究和图像技术应用的科技人员能够较全面地了解国内图像工程研究和发展的现状,有针对性地查询有关文献,且向期刊编者和作者提供有用的参考,对2020年度图像工程相关文献进行了统计和分析。具体是从国内15种有关图像工程重要中文期刊在2020年发行的共154期上所发表的2 785篇学术研究和技术应用文献中,选取出813篇属于图像工程领域的文献,并根据各文献的主要内容将其分别归入图像处理、图像分析、图像理解、技术应用和综述评论5个大类,然后进一步分入23个专业小类(与前15年相同),并在此基础上分别进行各期刊与各类文献的统计和分析。根据对2020年统计数据的分析可以看出:图像分析方向当前得到了最多的关注,其中目标检测和识别、图像分割和边缘检测、人体生物特征提取和验证等都是研究的焦点。另外,遥感、雷达、声呐、测绘以及生物、医学等领域的图像技术开发和应用最为活跃。总的来说,中国图像工程在2020年的研究深度和广度还在继续提高和扩大,仍保持着快速发展的势头。综合26年的统计数据还为读者提供了更全面和更可信的各研究方向发展趋势的信息。关键词:图像工程;图像处理;图像分析;图像理解;技术应用;文献综述;文献统计;文献分类;文献计量学48|97|5更新时间:2024-05-07
综述
-
 摘要:目的在图像超分辨率(super resolution,SR)任务中采用大尺寸的卷积神经网络(convolutional neural network,CNN)可以获得理想的性能,但是会引入大量参数,导致繁重的计算负担,并不适合很多计算资源受限的应用场景。为了解决上述问题,本文提出一种基于双阶段信息蒸馏的轻量级网络模型。方法提出一个双阶段带特征补偿的信息蒸馏模块(two-stage feature-compensated information distillation block,TFIDB)。TFIDB采用双阶段、特征补偿的信息蒸馏机制,有选择地提炼关键特征,同时将不同级别的特征进行合并,不仅提高了特征提炼的效率,还能促进网络内信息的流动。同时,TFIDB引入通道关注(channel attention,CA)机制,将经过双阶段信息蒸馏机制提炼的特征进行重要性判别,增强对特征的表达能力。以TFIDB为基础构建模块,提出完整的轻量级网络模型。在提出的网络模型中,设计了信息融合单元(information fusion unit,IFU)。IFU将网络各层级的信息进行有效融合,为最后重建阶段提供准确、丰富的层级信息。结果在5个基准测试集上,在放大倍数为2时,相较于知名的轻量级网络CARN (cascading residual network),本文算法分别获得了0.29 dB、0.08 dB、0.08 dB、0.27 dB和0.42 dB的峰值信噪比(peak singal to noise ratio,PSNR)增益,且模型参数量和乘加运算量明显更少。结论提出的双阶段带补偿的信息蒸馏机制可以有效提升网络模型的效率。将多个TFIDB进行级联,并辅以IFU模块构成的轻量级网络可以在模型尺寸和性能之间达到更好的平衡。关键词:超分辨率(SR);卷积神经网络(CNN);信息蒸馏;宽激活;通道关注(CA)119|267|1更新时间:2024-05-07
摘要:目的在图像超分辨率(super resolution,SR)任务中采用大尺寸的卷积神经网络(convolutional neural network,CNN)可以获得理想的性能,但是会引入大量参数,导致繁重的计算负担,并不适合很多计算资源受限的应用场景。为了解决上述问题,本文提出一种基于双阶段信息蒸馏的轻量级网络模型。方法提出一个双阶段带特征补偿的信息蒸馏模块(two-stage feature-compensated information distillation block,TFIDB)。TFIDB采用双阶段、特征补偿的信息蒸馏机制,有选择地提炼关键特征,同时将不同级别的特征进行合并,不仅提高了特征提炼的效率,还能促进网络内信息的流动。同时,TFIDB引入通道关注(channel attention,CA)机制,将经过双阶段信息蒸馏机制提炼的特征进行重要性判别,增强对特征的表达能力。以TFIDB为基础构建模块,提出完整的轻量级网络模型。在提出的网络模型中,设计了信息融合单元(information fusion unit,IFU)。IFU将网络各层级的信息进行有效融合,为最后重建阶段提供准确、丰富的层级信息。结果在5个基准测试集上,在放大倍数为2时,相较于知名的轻量级网络CARN (cascading residual network),本文算法分别获得了0.29 dB、0.08 dB、0.08 dB、0.27 dB和0.42 dB的峰值信噪比(peak singal to noise ratio,PSNR)增益,且模型参数量和乘加运算量明显更少。结论提出的双阶段带补偿的信息蒸馏机制可以有效提升网络模型的效率。将多个TFIDB进行级联,并辅以IFU模块构成的轻量级网络可以在模型尺寸和性能之间达到更好的平衡。关键词:超分辨率(SR);卷积神经网络(CNN);信息蒸馏;宽激活;通道关注(CA)119|267|1更新时间:2024-05-07 -
 摘要:目的超像素分割是计算机视觉领域常用的一项预处理技术,目标是将相邻像素聚集成为具有一定语义的子区域,能够大幅度降低后续处理的计算复杂度,但是对包含强梯度纹理的图像分割效果不佳,为此提出一种具有纹理感知能力的超像素分割方法。方法提出一种能够区分强梯度噪声和纹理像素的颜色距离,其中利用带方向的1/4圆形窗口均值滤波后的颜色信息,提升包含强梯度噪声和纹理图像的超像素分割性能。利用区间梯度幅值与Sobel梯度幅值相乘得到混合梯度幅值,具有纹理抑制、结构保持以及边缘线条细的优点,能够提升超像素的贴合边缘性能,增强超像素形状规则程度。最后,利用混合梯度的幅值计算具有结构回避能力的综合聚类距离,进一步防止超像素跨越物体的边界,增强超像素的贴边性能。结果在BSDS500(Berkeley segmentation dataset 500)图像数据集和强纹理马赛克图像等不同类型图像上的测试结果显示,与目前主流的超像素分割方法相比,本文算法在UE (undersegmentation error)、ASA (achievable segmentation accuracy)和CM (compactness measure)等性能指标上分别提高了1.5%、0.2%和4.3%。从视觉效果上看,能够在排除纹理干扰的情况下生成结构边缘贴合程度更好的形状规则超像素。结论本文算法在包含强梯度纹理图像上的超像素分割性能优于对比方法,在目标识别、目标追踪和显著性检测等易受强梯度干扰的技术领域具有较大应用潜力。关键词:图像分割;超像素;聚类;强梯度纹理;图像块;线性路径72|202|4更新时间:2024-05-07
摘要:目的超像素分割是计算机视觉领域常用的一项预处理技术,目标是将相邻像素聚集成为具有一定语义的子区域,能够大幅度降低后续处理的计算复杂度,但是对包含强梯度纹理的图像分割效果不佳,为此提出一种具有纹理感知能力的超像素分割方法。方法提出一种能够区分强梯度噪声和纹理像素的颜色距离,其中利用带方向的1/4圆形窗口均值滤波后的颜色信息,提升包含强梯度噪声和纹理图像的超像素分割性能。利用区间梯度幅值与Sobel梯度幅值相乘得到混合梯度幅值,具有纹理抑制、结构保持以及边缘线条细的优点,能够提升超像素的贴合边缘性能,增强超像素形状规则程度。最后,利用混合梯度的幅值计算具有结构回避能力的综合聚类距离,进一步防止超像素跨越物体的边界,增强超像素的贴边性能。结果在BSDS500(Berkeley segmentation dataset 500)图像数据集和强纹理马赛克图像等不同类型图像上的测试结果显示,与目前主流的超像素分割方法相比,本文算法在UE (undersegmentation error)、ASA (achievable segmentation accuracy)和CM (compactness measure)等性能指标上分别提高了1.5%、0.2%和4.3%。从视觉效果上看,能够在排除纹理干扰的情况下生成结构边缘贴合程度更好的形状规则超像素。结论本文算法在包含强梯度纹理图像上的超像素分割性能优于对比方法,在目标识别、目标追踪和显著性检测等易受强梯度干扰的技术领域具有较大应用潜力。关键词:图像分割;超像素;聚类;强梯度纹理;图像块;线性路径72|202|4更新时间:2024-05-07
图像处理和编码
-
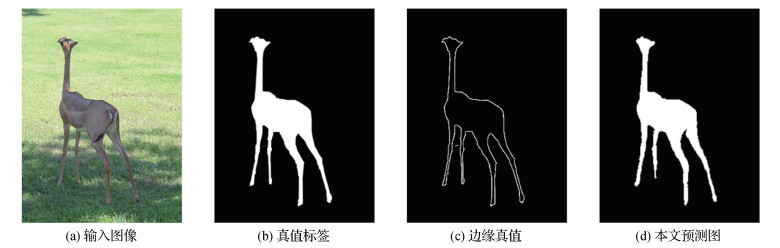 摘要:目的为了得到精确的显著对象分割结果,基于深度学习的方法大多引入注意力机制进行特征加权,以抑制噪声和冗余信息,但是对注意力机制的建模过程粗糙,并将所有特征均等处理,无法显式学习不同通道以及不同空间区域的全局重要性。为此,本文提出一种基于深度聚类注意力机制(deep cluster attention,DCA)的显著对象检测算法DCANet (DCA network),以更好地建模特征级别的像素上下文关联。方法DCA显式地将特征图分别在通道和空间上进行区域划分,即将特征聚类分为前景敏感区和背景敏感区。然后在类内执行一般性的逐像素注意力加权,并在类间进一步执行语义级注意力加权。DCA的思想清晰易懂,参数量少,可以便捷地部署到任意显著性检测网络中。结果在6个数据集上与19种方法的对比实验验证了DCA对得到精细显著对象分割掩码的有效性。在各项评价指标上,部署DCA之后的模型效果都得到了提升。在ECSSD (extended cornplex scene saliency dataset)数据集上,DCANet的性能比第2名在F值上提升了0.9%;在DUT-OMRON (Dalian University of Technology and OMRON Corporation)数据集中,DCANet的性能比第2名在F值上提升了0.5%,平均绝对误差(mean absolute error,MAE)降低了3.2%;在HKU-IS数据集上,DCANet的性能比第2名在F值上提升了0.3%,MAE降低了2.8%;在PASCAL (pattern analysis,statistical modeling and computational learning)-S (subset)数据集上,DCANet的性能则比第2名在F值上提升了0.8%,MAE降低了4.2%。结论本文提出的深度聚类注意力机制通过细粒度的通道划分和空间区域划分,有效地增强了前景敏感类的全局显著得分。与现有的注意力机制相比,DCA思想清晰、效果明显、部署简单,同时也为一般性的注意力机制研究提供了新的可行的研究方向。关键词:显著性检测;注意力机制;深度聚类;空间-通道维度解耦;全卷积网络(FCN)41|33|2更新时间:2024-05-07
摘要:目的为了得到精确的显著对象分割结果,基于深度学习的方法大多引入注意力机制进行特征加权,以抑制噪声和冗余信息,但是对注意力机制的建模过程粗糙,并将所有特征均等处理,无法显式学习不同通道以及不同空间区域的全局重要性。为此,本文提出一种基于深度聚类注意力机制(deep cluster attention,DCA)的显著对象检测算法DCANet (DCA network),以更好地建模特征级别的像素上下文关联。方法DCA显式地将特征图分别在通道和空间上进行区域划分,即将特征聚类分为前景敏感区和背景敏感区。然后在类内执行一般性的逐像素注意力加权,并在类间进一步执行语义级注意力加权。DCA的思想清晰易懂,参数量少,可以便捷地部署到任意显著性检测网络中。结果在6个数据集上与19种方法的对比实验验证了DCA对得到精细显著对象分割掩码的有效性。在各项评价指标上,部署DCA之后的模型效果都得到了提升。在ECSSD (extended cornplex scene saliency dataset)数据集上,DCANet的性能比第2名在F值上提升了0.9%;在DUT-OMRON (Dalian University of Technology and OMRON Corporation)数据集中,DCANet的性能比第2名在F值上提升了0.5%,平均绝对误差(mean absolute error,MAE)降低了3.2%;在HKU-IS数据集上,DCANet的性能比第2名在F值上提升了0.3%,MAE降低了2.8%;在PASCAL (pattern analysis,statistical modeling and computational learning)-S (subset)数据集上,DCANet的性能则比第2名在F值上提升了0.8%,MAE降低了4.2%。结论本文提出的深度聚类注意力机制通过细粒度的通道划分和空间区域划分,有效地增强了前景敏感类的全局显著得分。与现有的注意力机制相比,DCA思想清晰、效果明显、部署简单,同时也为一般性的注意力机制研究提供了新的可行的研究方向。关键词:显著性检测;注意力机制;深度聚类;空间-通道维度解耦;全卷积网络(FCN)41|33|2更新时间:2024-05-07 -
 摘要:目的小样本情况下的车标识别在实际智能交通系统中具有十分重要的应用价值。针对从实际监控系统中获取的车标图像低分辨率、低质量的特点,考虑如何从车标结构相似性、局部显著特征方面来对车标的整体特征进行增强,提出一种特征增强策略驱动下的车标识别方法(vehicle logo recognition method based on feature enhancement,FE-VLR)。方法提取车标图像的自对称相似特征,构建图像金字塔,在每层金字塔下提取车标的整体特征和局部显著特征,其中局部显著区域通过基于邻域块相关度的显著区域检测来获取,最后结合CRC(collaborative representation based classification)分类器对车标进行分类识别。结果在公开车标数据集HFUT-VL(Vehicle Logo Dataset from Hefei University of Technology)和XMU(Xiamen University Vehicle Logo Dataset)上对算法效果进行评估,实验结果表明,在小样本情况下,本文方法优于其他一些传统的车标识别方法,且与一些基于深度学习模型的方法相比,其识别率也有所提升。在HFUT-VL数据集上,当训练样本数为5时,识别率达到97.78%;当训练样本数为20时,识别率为99.1%。在更为复杂的XMU数据集上,本文方法表现出了更好的有效性和更强的鲁棒性,当训练样本在15幅及以下时,本文方法与具有较好表现的OE-POEM(overlapping enhanced patterns of oriented edge magnitudes)算法相比至少提升了7.2%。结论本文提出的基于特征增强策略的车标识别方法,通过融合自对称相似特征、局部显著特征和车标整体特征来增强特征的表达,提高了对实际道路中的低质量、低分辨率车标图像的识别能力,更能满足实际应用中对车标识别的需求。关键词:车标识别(VLR);特征增强(FE);自对称相似特征;局部显著特征;邻域块相关度106|184|2更新时间:2024-05-07
摘要:目的小样本情况下的车标识别在实际智能交通系统中具有十分重要的应用价值。针对从实际监控系统中获取的车标图像低分辨率、低质量的特点,考虑如何从车标结构相似性、局部显著特征方面来对车标的整体特征进行增强,提出一种特征增强策略驱动下的车标识别方法(vehicle logo recognition method based on feature enhancement,FE-VLR)。方法提取车标图像的自对称相似特征,构建图像金字塔,在每层金字塔下提取车标的整体特征和局部显著特征,其中局部显著区域通过基于邻域块相关度的显著区域检测来获取,最后结合CRC(collaborative representation based classification)分类器对车标进行分类识别。结果在公开车标数据集HFUT-VL(Vehicle Logo Dataset from Hefei University of Technology)和XMU(Xiamen University Vehicle Logo Dataset)上对算法效果进行评估,实验结果表明,在小样本情况下,本文方法优于其他一些传统的车标识别方法,且与一些基于深度学习模型的方法相比,其识别率也有所提升。在HFUT-VL数据集上,当训练样本数为5时,识别率达到97.78%;当训练样本数为20时,识别率为99.1%。在更为复杂的XMU数据集上,本文方法表现出了更好的有效性和更强的鲁棒性,当训练样本在15幅及以下时,本文方法与具有较好表现的OE-POEM(overlapping enhanced patterns of oriented edge magnitudes)算法相比至少提升了7.2%。结论本文提出的基于特征增强策略的车标识别方法,通过融合自对称相似特征、局部显著特征和车标整体特征来增强特征的表达,提高了对实际道路中的低质量、低分辨率车标图像的识别能力,更能满足实际应用中对车标识别的需求。关键词:车标识别(VLR);特征增强(FE);自对称相似特征;局部显著特征;邻域块相关度106|184|2更新时间:2024-05-07
图像分析和识别
-
 摘要:目的青光眼会对人的视力造成不可逆的损伤,从眼底图像中精确地分割视盘和视杯是青光眼诊治中的一项重要工作,为有效提升视盘和视杯的分割精度,本文提出了融合上下文和注意力的视盘视杯分割方法(context attention U-Net,CA-Net)。方法进行极坐标转换,在极坐标系下进行分割可以平衡数据分布。使用修改的预训练ResNet作为特征提取网络,增强特征提取能力。采用上下文聚合模块(context aggregation module,CAM)多层次聚合图像上下文信息,使用注意力指导模块(attention guidance module,AGM)对融合后的特征图进行特征重标定,增强有用特征;使用深度监督思想同时对浅层网络权重进行训练,同时在视杯分割网络中引入了先验知识,约束对视杯的分割。结果在3个数据集上与其他方法进行对比实验,在Drishti-GS1数据集中,分割视盘的Dice(dice coefficient)和IOU(intersection-over-union)分别为0.981 4和0.963 5,分割视杯的Dice和IOU分别为0.926 6和0.863 3;在RIM-ONE(retinal image database for optic nerve evaluation)-v3数据集中,分割视盘的Dice和IOU分别为0.976 8和0.954 6,分割视杯的Dice和IOU分别为0.864 2和0.760 9;在Refuge数据集中,分割视盘的Dice和IOU分别为0.975 8和0.952 7,分割视杯的Dice和IOU分别为0.887 1和0.797 2,均优于对比算法。同时,消融实验验证了各模块的有效性,跨数据集实验进一步表明了CA-Net的泛化性,可视化图像也表明CA-Net能够分割出更接近标注的分割结果。结论在Drishti-GS1、RIM-ONE-v3和Refuge三个数据集的测试结果表明,CA-Net均能取得最优的视盘和视杯分割结果,跨数据集测试结果也更加表明了CA-Net具有良好的泛化性能。关键词:青光眼;视盘;视杯;上下文聚合模块;注意力指导模块;深度监督;先验知识129|328|3更新时间:2024-05-07
摘要:目的青光眼会对人的视力造成不可逆的损伤,从眼底图像中精确地分割视盘和视杯是青光眼诊治中的一项重要工作,为有效提升视盘和视杯的分割精度,本文提出了融合上下文和注意力的视盘视杯分割方法(context attention U-Net,CA-Net)。方法进行极坐标转换,在极坐标系下进行分割可以平衡数据分布。使用修改的预训练ResNet作为特征提取网络,增强特征提取能力。采用上下文聚合模块(context aggregation module,CAM)多层次聚合图像上下文信息,使用注意力指导模块(attention guidance module,AGM)对融合后的特征图进行特征重标定,增强有用特征;使用深度监督思想同时对浅层网络权重进行训练,同时在视杯分割网络中引入了先验知识,约束对视杯的分割。结果在3个数据集上与其他方法进行对比实验,在Drishti-GS1数据集中,分割视盘的Dice(dice coefficient)和IOU(intersection-over-union)分别为0.981 4和0.963 5,分割视杯的Dice和IOU分别为0.926 6和0.863 3;在RIM-ONE(retinal image database for optic nerve evaluation)-v3数据集中,分割视盘的Dice和IOU分别为0.976 8和0.954 6,分割视杯的Dice和IOU分别为0.864 2和0.760 9;在Refuge数据集中,分割视盘的Dice和IOU分别为0.975 8和0.952 7,分割视杯的Dice和IOU分别为0.887 1和0.797 2,均优于对比算法。同时,消融实验验证了各模块的有效性,跨数据集实验进一步表明了CA-Net的泛化性,可视化图像也表明CA-Net能够分割出更接近标注的分割结果。结论在Drishti-GS1、RIM-ONE-v3和Refuge三个数据集的测试结果表明,CA-Net均能取得最优的视盘和视杯分割结果,跨数据集测试结果也更加表明了CA-Net具有良好的泛化性能。关键词:青光眼;视盘;视杯;上下文聚合模块;注意力指导模块;深度监督;先验知识129|328|3更新时间:2024-05-07
医学图像处理
-
 摘要:目的船舶在合成孔径雷达(synthetic aperture radar,SAR)图像中的检测是研究热点,但目前适合近岸舰船检测的方法并不多。在SAR图像中,近岸舰船受到岸上建筑物的干扰严重,尤其是对于排列紧密的近岸船舶来说,其对比度相似,很难区分船舶与背景。为解决近岸舰船检测困难问题,提出了一种基于加权双向注意金字塔网络的近岸舰船检测方法。方法本文在FCOS(fully convolutional one-stage)网络的基础上提出了一种新的双向特征金字塔网络。将卷积注意力机制模块(convolutional block attention module,CBAM)与金字塔网络的每个特征图进行连接,提取丰富的语义信息特征;借鉴PANet(path aggregation network)的思想,添加自下而上的金字塔模块,突出不同尺度船舶的显著特征。最后提出了一种加权特征融合方式,使特征图提取的特征信息的着重点不同,提高舰船检测精度。结果本文在公开的SAR图像舰船数据集SSDD(SAR ship detection dataset)上进行实验。实验结果表明,相比原FCOS方法,本文方法的检测精度提高了9.5%;与对比方法相比,本文方法在同等条件下的检测精度达到90.2%。在速度方面,本文方法比SSD提高0.6 s,比Faster R-CNN(region convolutional neural network)提高1.67 s,明显优于对比方法。结论本文通过改进特征网络和特征融合方式,提高了算法对SAR图像舰船目标检测中背景复杂、排列紧密的近岸舰船目标的定位效果,有效增强了对舰船目标定位的准确性。关键词:近岸舰船;合成孔径雷达图像;目标检测;复杂背景;深度学习;小目标73|203|6更新时间:2024-05-07
摘要:目的船舶在合成孔径雷达(synthetic aperture radar,SAR)图像中的检测是研究热点,但目前适合近岸舰船检测的方法并不多。在SAR图像中,近岸舰船受到岸上建筑物的干扰严重,尤其是对于排列紧密的近岸船舶来说,其对比度相似,很难区分船舶与背景。为解决近岸舰船检测困难问题,提出了一种基于加权双向注意金字塔网络的近岸舰船检测方法。方法本文在FCOS(fully convolutional one-stage)网络的基础上提出了一种新的双向特征金字塔网络。将卷积注意力机制模块(convolutional block attention module,CBAM)与金字塔网络的每个特征图进行连接,提取丰富的语义信息特征;借鉴PANet(path aggregation network)的思想,添加自下而上的金字塔模块,突出不同尺度船舶的显著特征。最后提出了一种加权特征融合方式,使特征图提取的特征信息的着重点不同,提高舰船检测精度。结果本文在公开的SAR图像舰船数据集SSDD(SAR ship detection dataset)上进行实验。实验结果表明,相比原FCOS方法,本文方法的检测精度提高了9.5%;与对比方法相比,本文方法在同等条件下的检测精度达到90.2%。在速度方面,本文方法比SSD提高0.6 s,比Faster R-CNN(region convolutional neural network)提高1.67 s,明显优于对比方法。结论本文通过改进特征网络和特征融合方式,提高了算法对SAR图像舰船目标检测中背景复杂、排列紧密的近岸舰船目标的定位效果,有效增强了对舰船目标定位的准确性。关键词:近岸舰船;合成孔径雷达图像;目标检测;复杂背景;深度学习;小目标73|203|6更新时间:2024-05-07 -
 摘要:目的雷达回波外推是进行短临降水预测的一种重要方法,相较于传统的数值天气预报方法能够实现更快、更准确的预测。基于卷积长短期记忆网络(convolutional long short-term memory network,ConvLSTM)的回波外推算法的效果优于其他的深度学习外推算法,但是忽略了普通卷积运算在面对局部变化特征时的局限性,并且在外推过程中将损失函数简单定义为均方误差(mean squared error,MSE),忽略了外推图像与原始图像的分布相似性,容易导致信息丢失。为解决以上不足,提出了一种基于对抗型光流长短期记忆网络(deep convolutional generative adversarial flow based long short-term memory network,DCF-LSTM)的回波外推算法。方法首先,采用光流追踪局部特征的方式改进ConvLSTM,突破了一般卷积核面对局部变化特征的限制。然后,以光流长短期记忆网络(flow based long short-term memory network,FLSTM)作为基本模块构建外推模型。最后,引入对抗网络,与外推模型组成端到端的博弈系统DCF-LSTM,两者交替训练实现外推图像分布向原图像分布的拟合。结果在4种不同的反射率强度下进行了消融研究,并与3种主流的气象业务算法进行了对比。实验结果表明,DCF-LSTM在所有评价指标中表现最优,尤其在反射率为35 dBZ的条件下。结论由实验结果可知,引入光流法能够使模型具有更好的抗畸变性,引入深度卷积生成对抗网络(deep convolutional generative adversarial network,DCGAN)判别模块能进一步增加结果的准确性。本文提出的DCF-LSTM回波外推算法相比于其他算法,雷达外推准确率获得了进一步提升。关键词:雷达回波外推;卷积长短期记忆网络(ConvLSTM);深度卷积生成对抗网络(DCGAN);光流法;序列到序列结构156|318|3更新时间:2024-05-07
摘要:目的雷达回波外推是进行短临降水预测的一种重要方法,相较于传统的数值天气预报方法能够实现更快、更准确的预测。基于卷积长短期记忆网络(convolutional long short-term memory network,ConvLSTM)的回波外推算法的效果优于其他的深度学习外推算法,但是忽略了普通卷积运算在面对局部变化特征时的局限性,并且在外推过程中将损失函数简单定义为均方误差(mean squared error,MSE),忽略了外推图像与原始图像的分布相似性,容易导致信息丢失。为解决以上不足,提出了一种基于对抗型光流长短期记忆网络(deep convolutional generative adversarial flow based long short-term memory network,DCF-LSTM)的回波外推算法。方法首先,采用光流追踪局部特征的方式改进ConvLSTM,突破了一般卷积核面对局部变化特征的限制。然后,以光流长短期记忆网络(flow based long short-term memory network,FLSTM)作为基本模块构建外推模型。最后,引入对抗网络,与外推模型组成端到端的博弈系统DCF-LSTM,两者交替训练实现外推图像分布向原图像分布的拟合。结果在4种不同的反射率强度下进行了消融研究,并与3种主流的气象业务算法进行了对比。实验结果表明,DCF-LSTM在所有评价指标中表现最优,尤其在反射率为35 dBZ的条件下。结论由实验结果可知,引入光流法能够使模型具有更好的抗畸变性,引入深度卷积生成对抗网络(deep convolutional generative adversarial network,DCGAN)判别模块能进一步增加结果的准确性。本文提出的DCF-LSTM回波外推算法相比于其他算法,雷达外推准确率获得了进一步提升。关键词:雷达回波外推;卷积长短期记忆网络(ConvLSTM);深度卷积生成对抗网络(DCGAN);光流法;序列到序列结构156|318|3更新时间:2024-05-07 -
 摘要:目的针对传统基于混沌系统的图像加密算法在加密遥感图像时存在速度差、安全性不足等问题,提出一种混沌系统和脱氧核糖核酸(deoxyribonucleic acid,DNA)编码的并行遥感图像加密算法,提升图像加密的效率和安全性。方法利用明文图像的安全散列算法256(secure Hash algorithm 256,SHA-256)哈希值修改混沌系统的参数和初始值,提高算法的明文敏感性,并通过2维Hénon-Sine映射置乱图像,打乱像素之间的分布规律;然后利用图形处理器(graphics processing unit,GPU)并行计算密钥序列,缩短加密时间,通过选择多个高维混沌系统和修改混沌系统初始值确保密钥序列的随机性;最后利用密钥序列和GPU对图像进行DNA并行加密,得到最终的密文图像。在DNA并行加密过程中,生成一种DNA-S盒,对DNA编码进行非线性替换。结果在遥感图像以及普通彩色图像上的仿真实验和安全性分析结果表明,本文算法在加密遥感图像上速度达到80 Mbit/s以上,密钥空间大于10200,信息熵趋近于8,密文图像直方图平坦均匀,且通过了美国国家标准与技术研究院(National Institute of Standards and Technology,NIST)随机测试以及卡方检验;与其他算法相比,本文算法在密钥空间、相邻像素相关性、像素改变率(number of changing pixel rate,NPCR)、统一平均变化强度(unified averaged changed intensity,UACI)和信息熵等评价指标上更接近理想值。结论本文算法在大幅提升加密速度的同时,保证算法足够安全,能够抵抗各种攻击,适合遥感图像以及大容量图像的保密存储和网络传输。关键词:遥感图像;混沌系统;脱氧核糖核酸(DNA)序列;并行;安全散列算法256(SHA-256)182|287|6更新时间:2024-05-07
摘要:目的针对传统基于混沌系统的图像加密算法在加密遥感图像时存在速度差、安全性不足等问题,提出一种混沌系统和脱氧核糖核酸(deoxyribonucleic acid,DNA)编码的并行遥感图像加密算法,提升图像加密的效率和安全性。方法利用明文图像的安全散列算法256(secure Hash algorithm 256,SHA-256)哈希值修改混沌系统的参数和初始值,提高算法的明文敏感性,并通过2维Hénon-Sine映射置乱图像,打乱像素之间的分布规律;然后利用图形处理器(graphics processing unit,GPU)并行计算密钥序列,缩短加密时间,通过选择多个高维混沌系统和修改混沌系统初始值确保密钥序列的随机性;最后利用密钥序列和GPU对图像进行DNA并行加密,得到最终的密文图像。在DNA并行加密过程中,生成一种DNA-S盒,对DNA编码进行非线性替换。结果在遥感图像以及普通彩色图像上的仿真实验和安全性分析结果表明,本文算法在加密遥感图像上速度达到80 Mbit/s以上,密钥空间大于10200,信息熵趋近于8,密文图像直方图平坦均匀,且通过了美国国家标准与技术研究院(National Institute of Standards and Technology,NIST)随机测试以及卡方检验;与其他算法相比,本文算法在密钥空间、相邻像素相关性、像素改变率(number of changing pixel rate,NPCR)、统一平均变化强度(unified averaged changed intensity,UACI)和信息熵等评价指标上更接近理想值。结论本文算法在大幅提升加密速度的同时,保证算法足够安全,能够抵抗各种攻击,适合遥感图像以及大容量图像的保密存储和网络传输。关键词:遥感图像;混沌系统;脱氧核糖核酸(DNA)序列;并行;安全散列算法256(SHA-256)182|287|6更新时间:2024-05-07
遥感图像处理
-
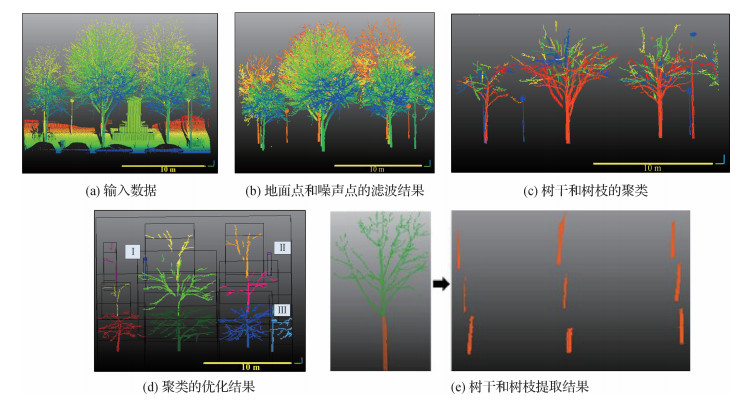 摘要:目的移动激光扫描系统能够成功采集丰富的城市行道树侧边信息,然而由于点云数据规模大、密度欠均匀和噪声多等原因,导致行道树的提取精度和效率偏低。为此,本文提出一种基于层次聚类的算法从移动激光扫描点云中提取树干。方法采用自下而上的聚类策略合并目标区域,基于点云间欧氏距离和点云的局部主方向计算聚类所需的邻近矩阵,通过构造能量函数评估不同的簇合并方案,将能量函数最小化问题转换为计算二分图匹配问题,求解二分图的最小代价完美匹配获得全局最优的层次聚类。结果实验在公开的巴黎场景数据集与自采集的南京黄埔路场景数据集上进行测试,本文提出的自下向上的聚类算法成功地从点云中提取出树干和主要树枝点,其中提取树干的平均正确率、完整率和F-score分别为98.5%、94.8%和0.97,与其他算法中最好的实验结果对比,分别提高了1.0%、0.6%和0.02。结论实验结果表明,本文算法通过优化层次聚类中的簇合并,可以有效减少聚类中的“过分割”和“欠分割”,提高点云中树干的分割精度与效率。关键词:3维数据处理;计算机视觉;图匹配;层次聚类;点云数据;城市行道树98|1607|2更新时间:2024-05-07
摘要:目的移动激光扫描系统能够成功采集丰富的城市行道树侧边信息,然而由于点云数据规模大、密度欠均匀和噪声多等原因,导致行道树的提取精度和效率偏低。为此,本文提出一种基于层次聚类的算法从移动激光扫描点云中提取树干。方法采用自下而上的聚类策略合并目标区域,基于点云间欧氏距离和点云的局部主方向计算聚类所需的邻近矩阵,通过构造能量函数评估不同的簇合并方案,将能量函数最小化问题转换为计算二分图匹配问题,求解二分图的最小代价完美匹配获得全局最优的层次聚类。结果实验在公开的巴黎场景数据集与自采集的南京黄埔路场景数据集上进行测试,本文提出的自下向上的聚类算法成功地从点云中提取出树干和主要树枝点,其中提取树干的平均正确率、完整率和F-score分别为98.5%、94.8%和0.97,与其他算法中最好的实验结果对比,分别提高了1.0%、0.6%和0.02。结论实验结果表明,本文算法通过优化层次聚类中的簇合并,可以有效减少聚类中的“过分割”和“欠分割”,提高点云中树干的分割精度与效率。关键词:3维数据处理;计算机视觉;图匹配;层次聚类;点云数据;城市行道树98|1607|2更新时间:2024-05-07 -
 摘要:目的当前的大场景3维点云语义分割方法一般是将大规模点云切成点云块再进行处理。然而在实际计算过程中,切割边界的几何特征容易被破坏,使得分割结果呈现明显的边界现象。因此,迫切需要以原始点云作为输入的高效深度学习网络模型,用于点云的语义分割。方法为了解决该问题,提出基于多特征融合与残差优化的点云语义分割方法。网络通过一个多特征提取模块来提取每个点的几何结构特征以及语义特征,通过对特征的加权获取特征集合。在此基础上,引入注意力机制优化特征集合,构建特征聚合模块,聚合点云中最具辨别力的特征。最后在特征聚合模块中添加残差块,优化网络训练。最终网络的输出是每个点在数据集中各个类别的置信度。结果本文提出的残差网络模型在S3DIS(Stanford Large-scale 3D Indoor Spaces Dataset)与户外场景点云分割数据集Semantic3D等2个数据集上与当前的主流算法进行了分割精度的对比。在S3DIS数据集中,本文算法在全局准确率以及平均准确率上均取得了较高精度,分别为87.2%,81.7%。在Semantic3D数据集上,本文算法在全局准确率和平均交并比上均取得了较高精度,分别为93.5%,74.0%,比GACNet(graph attention convolution network)分别高1.6%,3.2%。结论实验结果验证了本文提出的残差优化网络在大规模点云语义分割的应用中,可以缓解深层次特征提取过程中梯度消失和网络过拟合现象并保持良好的分割性能。关键词:计算机视觉;3维点云;大场景;语义分割;多特征融合;残差网络156|518|7更新时间:2024-05-07
摘要:目的当前的大场景3维点云语义分割方法一般是将大规模点云切成点云块再进行处理。然而在实际计算过程中,切割边界的几何特征容易被破坏,使得分割结果呈现明显的边界现象。因此,迫切需要以原始点云作为输入的高效深度学习网络模型,用于点云的语义分割。方法为了解决该问题,提出基于多特征融合与残差优化的点云语义分割方法。网络通过一个多特征提取模块来提取每个点的几何结构特征以及语义特征,通过对特征的加权获取特征集合。在此基础上,引入注意力机制优化特征集合,构建特征聚合模块,聚合点云中最具辨别力的特征。最后在特征聚合模块中添加残差块,优化网络训练。最终网络的输出是每个点在数据集中各个类别的置信度。结果本文提出的残差网络模型在S3DIS(Stanford Large-scale 3D Indoor Spaces Dataset)与户外场景点云分割数据集Semantic3D等2个数据集上与当前的主流算法进行了分割精度的对比。在S3DIS数据集中,本文算法在全局准确率以及平均准确率上均取得了较高精度,分别为87.2%,81.7%。在Semantic3D数据集上,本文算法在全局准确率和平均交并比上均取得了较高精度,分别为93.5%,74.0%,比GACNet(graph attention convolution network)分别高1.6%,3.2%。结论实验结果验证了本文提出的残差优化网络在大规模点云语义分割的应用中,可以缓解深层次特征提取过程中梯度消失和网络过拟合现象并保持良好的分割性能。关键词:计算机视觉;3维点云;大场景;语义分割;多特征融合;残差网络156|518|7更新时间:2024-05-07
激光雷达大会2020
-
 摘要:目的动漫制作中线稿绘制与上色耗时费力,为此很多研究致力于动漫制作过程自动化。目前基于数据驱动的自动化研究工作快速发展,但并没有一个公开的线稿数据集可供使用。针对真实线稿图像数据获取困难,以及现有线稿提取方法效果失真等问题,提出基于循环生成对抗网络的线稿图像自动提取模型。方法模型基于循环生成对抗网络结构,以解决非对称数据训练问题。然后将不同比例的输入图像及其边界图输入到掩码指导卷积单元,以自适应选择网络中间特征。同时为了进一步提升网络提取线稿的效果,提出边界一致性约束损失函数,确保生成结果与输入图像在梯度变化上的一致性。结果在公开的动漫彩色图像数据集Danbooru2018上,应用本文模型提取的线稿图像相比于现有线稿提取方法,噪声少、线条清晰且接近真实漫画家绘制的线稿图像。实验中邀请30名年龄在2025岁的用户,对本文以及其他4种方法提取的线稿图像进行打分。最终在30组测试样例中,本文方法提取的线稿图像被认为最佳的样例占总样例84%。结论通过在循环生成对抗网络中引入掩码指导单元,更加合理地提取彩色图像的线稿图像,并通过对已有方法提取效果进行用户打分证明,在动漫线稿图像提取中本文方法优于对比方法。此外,该模型不需要大量真实线稿图像训练数据,实验中仅采集1 000幅左右真实线稿图像。模型不仅为后续动漫绘制与上色研究提供数据支持,同时也为图像边缘提取方法提供了新的解决方案。关键词:动漫线稿图像生成;非对称数据训练;掩码指导卷积单元(MGCU);循环生成对抗网络(CycleGAN);卷积神经网络(CNN)115|142|0更新时间:2024-05-07
摘要:目的动漫制作中线稿绘制与上色耗时费力,为此很多研究致力于动漫制作过程自动化。目前基于数据驱动的自动化研究工作快速发展,但并没有一个公开的线稿数据集可供使用。针对真实线稿图像数据获取困难,以及现有线稿提取方法效果失真等问题,提出基于循环生成对抗网络的线稿图像自动提取模型。方法模型基于循环生成对抗网络结构,以解决非对称数据训练问题。然后将不同比例的输入图像及其边界图输入到掩码指导卷积单元,以自适应选择网络中间特征。同时为了进一步提升网络提取线稿的效果,提出边界一致性约束损失函数,确保生成结果与输入图像在梯度变化上的一致性。结果在公开的动漫彩色图像数据集Danbooru2018上,应用本文模型提取的线稿图像相比于现有线稿提取方法,噪声少、线条清晰且接近真实漫画家绘制的线稿图像。实验中邀请30名年龄在2025岁的用户,对本文以及其他4种方法提取的线稿图像进行打分。最终在30组测试样例中,本文方法提取的线稿图像被认为最佳的样例占总样例84%。结论通过在循环生成对抗网络中引入掩码指导单元,更加合理地提取彩色图像的线稿图像,并通过对已有方法提取效果进行用户打分证明,在动漫线稿图像提取中本文方法优于对比方法。此外,该模型不需要大量真实线稿图像训练数据,实验中仅采集1 000幅左右真实线稿图像。模型不仅为后续动漫绘制与上色研究提供数据支持,同时也为图像边缘提取方法提供了新的解决方案。关键词:动漫线稿图像生成;非对称数据训练;掩码指导卷积单元(MGCU);循环生成对抗网络(CycleGAN);卷积神经网络(CNN)115|142|0更新时间:2024-05-07 -
 摘要:目的当前的疾病传播研究主要集中于时序数据和传染病模型,缺乏运用空间信息提升预测精度的探索和解释。在处理时空数据时需要分别提取时间特征和空间特征,再进行特征融合得到较为可靠的预测结果。本文提出一种基于图卷积神经网络(graph convolutional neural network,GCN)的时空数据学习方法,能够运用空间模型端对端地学习时空数据,代替此前由多模块单元相集成的模式。方法依据数据可视化阶段呈现出的地理空间、高铁线路、飞机航线与感染人数之间的正相关关系,将中国各城市之间的空间分布关系和交通连接关系映射成网络图并编码成地理邻接矩阵、高铁线路直达矩阵、飞机航线直达矩阵以及飞机航线或高铁线路直达矩阵。按滑动时间窗口对疫情数据进行切片后形成张量,依次分批输入到图深度学习模型中参与卷积运算,通过信息传递、反向传播和梯度下降更新可训练参数。结果在新型冠状病毒肺炎疫情数据集上的实验结果显示,采用GCN学习这一时空数据的分布特征相较于循环神经网络模型,在训练过程中表现出了更强的拟合能力,在训练时间层面节约75%以上的运算成本,在两类损失函数下的平均测试集损失能够下降80%左右。结论本文所采用的时空数据学习方法具有较低的运算成本和较高的预测精度,尤其在空间特征强于时间特征的时空数据中有着更好的性能,并且为流行病传播范围和感染人数的预测提供了新的方法和思路,有助于相关部门在公共卫生事件中制定应对措施和疾病防控决策。关键词:深度学习;图卷积神经网络(GCN);时空数据处理;新冠肺炎;疫情预测95|292|0更新时间:2024-05-07
摘要:目的当前的疾病传播研究主要集中于时序数据和传染病模型,缺乏运用空间信息提升预测精度的探索和解释。在处理时空数据时需要分别提取时间特征和空间特征,再进行特征融合得到较为可靠的预测结果。本文提出一种基于图卷积神经网络(graph convolutional neural network,GCN)的时空数据学习方法,能够运用空间模型端对端地学习时空数据,代替此前由多模块单元相集成的模式。方法依据数据可视化阶段呈现出的地理空间、高铁线路、飞机航线与感染人数之间的正相关关系,将中国各城市之间的空间分布关系和交通连接关系映射成网络图并编码成地理邻接矩阵、高铁线路直达矩阵、飞机航线直达矩阵以及飞机航线或高铁线路直达矩阵。按滑动时间窗口对疫情数据进行切片后形成张量,依次分批输入到图深度学习模型中参与卷积运算,通过信息传递、反向传播和梯度下降更新可训练参数。结果在新型冠状病毒肺炎疫情数据集上的实验结果显示,采用GCN学习这一时空数据的分布特征相较于循环神经网络模型,在训练过程中表现出了更强的拟合能力,在训练时间层面节约75%以上的运算成本,在两类损失函数下的平均测试集损失能够下降80%左右。结论本文所采用的时空数据学习方法具有较低的运算成本和较高的预测精度,尤其在空间特征强于时间特征的时空数据中有着更好的性能,并且为流行病传播范围和感染人数的预测提供了新的方法和思路,有助于相关部门在公共卫生事件中制定应对措施和疾病防控决策。关键词:深度学习;图卷积神经网络(GCN);时空数据处理;新冠肺炎;疫情预测95|292|0更新时间:2024-05-07 -
 摘要:目的随着互联网技术的飞速发展,彩色数字图像带来极大便利的同时,也产生了一些篡改、剽窃等侵权行为;同时,几何处理对含水印载体的破坏使水印盲检测的难度增加,因此,本文提出一种基于汉明码和图像矫正的彩色图像盲水印方法,旨在解决当前图像版权保护的难点问题。方法嵌入水印时,使用仿射变换加密彩色水印,并将已加密的信息编为汉明码,然后利用特征值分解计算出像素块的全部特征值,并通过对特征值绝对值的和进行量化来完成水印的嵌入;提取水印时,利用图像的几何属性对多种几何攻击后的图像进行判断、矫正,并借助量化技术提取水印。结果基于彩色图像标准数据库,将本文方法与7种相关方法进行了对比实验:在不可见性方面,与LU分解的水印方法相比,本文算法峰值信噪比(peak signal-to-noise ratio,PSNR)提高了4 dB;在常规攻击鲁棒性方面,与Schur分解的最新方法相比,本文算法平均归一化互相关(normalized cross-correlation,NC)的值稍有提高;在几何攻击鲁棒性方面,本文算法NC值具有一定的优势;同时,本文算法的水印容量达到了0.25 bit/像素,密钥空间达到了2432,运行时间仅需3 s左右。结论所提方法不仅具有较好的水印不可见性和较强的鲁棒性,而且具有较大的水印容量、较高的安全性和实时性。关键词:彩色图像;数字水印;汉明码;图像矫正;特征值分解;仿射变换66|175|1更新时间:2024-05-07
摘要:目的随着互联网技术的飞速发展,彩色数字图像带来极大便利的同时,也产生了一些篡改、剽窃等侵权行为;同时,几何处理对含水印载体的破坏使水印盲检测的难度增加,因此,本文提出一种基于汉明码和图像矫正的彩色图像盲水印方法,旨在解决当前图像版权保护的难点问题。方法嵌入水印时,使用仿射变换加密彩色水印,并将已加密的信息编为汉明码,然后利用特征值分解计算出像素块的全部特征值,并通过对特征值绝对值的和进行量化来完成水印的嵌入;提取水印时,利用图像的几何属性对多种几何攻击后的图像进行判断、矫正,并借助量化技术提取水印。结果基于彩色图像标准数据库,将本文方法与7种相关方法进行了对比实验:在不可见性方面,与LU分解的水印方法相比,本文算法峰值信噪比(peak signal-to-noise ratio,PSNR)提高了4 dB;在常规攻击鲁棒性方面,与Schur分解的最新方法相比,本文算法平均归一化互相关(normalized cross-correlation,NC)的值稍有提高;在几何攻击鲁棒性方面,本文算法NC值具有一定的优势;同时,本文算法的水印容量达到了0.25 bit/像素,密钥空间达到了2432,运行时间仅需3 s左右。结论所提方法不仅具有较好的水印不可见性和较强的鲁棒性,而且具有较大的水印容量、较高的安全性和实时性。关键词:彩色图像;数字水印;汉明码;图像矫正;特征值分解;仿射变换66|175|1更新时间:2024-05-07 -
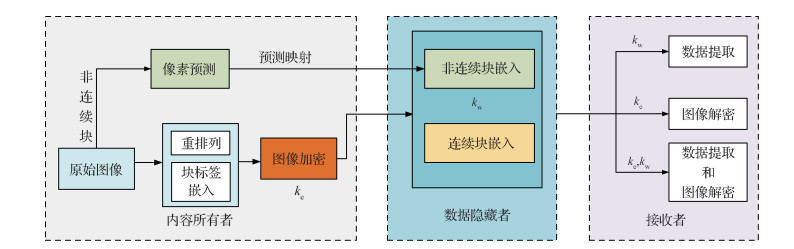 摘要:目的针对现有的加密域可逆信息隐藏算法未能充分利用图像的全部位平面的问题,提出了一种密文域高嵌入率图像全位面可逆数据隐藏。方法对载体图像进行加密,然后将隐蔽信息嵌入到加密图像中,进行隐蔽传输,发送给接收者。本文将灰度图像的8个位平面都用来进行数据嵌入,并把每个位平面划分成不重叠的块,分为非连续块(块内像素值0,1都存在)和连续块(块内为全0或全1像素值),按块进行重排列且将排列前的块标签嵌入到重排列图像中,使用流密码对图像进行加密。在数据嵌入阶段,提出了带修正信息的像素预测方法用于非连续块的嵌入。连续块中,保持块内右下角像素值不变,用于连续块的恢复,其他位置嵌入数据;非连续块中,对预测正确的像素嵌入数据,预测错误的像素保持不变。结果实验过程实现了多种密文域可逆数据隐藏算法,本文进行大量对比实验,并在BOSSbase和BOWS-2数据集上进行验证,与其他方法比较,本文方法在BOSSbase和BOWS-2数据集上的嵌入率分别提升了42.1%和43.3%。结论提出的加密图像可逆数据隐藏方案,通过对不同性质的块采用不同方法进行数据嵌入,利用图像全位面信息,使得方案能够获得更高的嵌入率,表明了本文方法的有效性。关键词:像素预测;全位面;图像加密;可逆数据隐藏;图像恢复119|182|3更新时间:2024-05-07
摘要:目的针对现有的加密域可逆信息隐藏算法未能充分利用图像的全部位平面的问题,提出了一种密文域高嵌入率图像全位面可逆数据隐藏。方法对载体图像进行加密,然后将隐蔽信息嵌入到加密图像中,进行隐蔽传输,发送给接收者。本文将灰度图像的8个位平面都用来进行数据嵌入,并把每个位平面划分成不重叠的块,分为非连续块(块内像素值0,1都存在)和连续块(块内为全0或全1像素值),按块进行重排列且将排列前的块标签嵌入到重排列图像中,使用流密码对图像进行加密。在数据嵌入阶段,提出了带修正信息的像素预测方法用于非连续块的嵌入。连续块中,保持块内右下角像素值不变,用于连续块的恢复,其他位置嵌入数据;非连续块中,对预测正确的像素嵌入数据,预测错误的像素保持不变。结果实验过程实现了多种密文域可逆数据隐藏算法,本文进行大量对比实验,并在BOSSbase和BOWS-2数据集上进行验证,与其他方法比较,本文方法在BOSSbase和BOWS-2数据集上的嵌入率分别提升了42.1%和43.3%。结论提出的加密图像可逆数据隐藏方案,通过对不同性质的块采用不同方法进行数据嵌入,利用图像全位面信息,使得方案能够获得更高的嵌入率,表明了本文方法的有效性。关键词:像素预测;全位面;图像加密;可逆数据隐藏;图像恢复119|182|3更新时间:2024-05-07 -
 摘要:目的激光雷达在自动驾驶中具有重要意义,但其价格昂贵,且产生的激光线束数量仍然较少,造成采集的点云密度较稀疏。为了更好地感知周围环境,本文提出一种激光雷达数据增强算法,由双目图像生成伪点云并对伪点云进行坐标修正,进而实现激光雷达点云的稠密化处理,提高3D目标检测精度。此算法不针对特定的3D目标检测网络结构,是一种通用的点云稠密化方法。方法首先利用双目RGB图像生成深度图像,根据先验的相机参数和深度信息计算出每个像素点在雷达坐标系下的粗略3维坐标,即伪点云。为了更好地分割地面,本文提出了循环RANSAC(random sample consensus)算法,引入了一个分离平面型非地面点云的暂存器,改进复杂场景下的地面分割效果。然后将原始点云进行地面分割后插入KDTree(k-dimensional tree),以伪点云中的每个点为中心在KDTree中搜索若干近邻点,基于这些近邻点进行曲面重建。根据曲面重建结果,设计一种计算几何方法导出伪点云修正后的精确坐标。最后,将修正后的伪点云与原始激光雷达点云融合得到稠密化点云。结果实验结果表明,稠密化的点云在视觉上具有较好的质量,物体具有更加完整的形状和轮廓,并且在KITTI(Karlsruhe Institute of Technology and Toyota Technological Institute)数据集上提升了3D目标检测精度。在使用该数据增强方法后,KITTI数据集下AVOD(aggregate view object detection)检测方法的AP3D-Easy(average precision of 3D object detection on easy setting)提升了8.25%,AVOD-FPN(aggregate view object detection with feature pyramid network)检测方法的APBEV-Hard(average precision of bird’s eye view on hard setting)提升了7.14%。结论本文提出的激光雷达数据增强算法,实现了点云的稠密化处理,并使3D目标检测结果更加精确。关键词:激光雷达;数据增强;点云稠密化;伪点云;地面分割;3D目标检测76|1124|0更新时间:2024-05-07
摘要:目的激光雷达在自动驾驶中具有重要意义,但其价格昂贵,且产生的激光线束数量仍然较少,造成采集的点云密度较稀疏。为了更好地感知周围环境,本文提出一种激光雷达数据增强算法,由双目图像生成伪点云并对伪点云进行坐标修正,进而实现激光雷达点云的稠密化处理,提高3D目标检测精度。此算法不针对特定的3D目标检测网络结构,是一种通用的点云稠密化方法。方法首先利用双目RGB图像生成深度图像,根据先验的相机参数和深度信息计算出每个像素点在雷达坐标系下的粗略3维坐标,即伪点云。为了更好地分割地面,本文提出了循环RANSAC(random sample consensus)算法,引入了一个分离平面型非地面点云的暂存器,改进复杂场景下的地面分割效果。然后将原始点云进行地面分割后插入KDTree(k-dimensional tree),以伪点云中的每个点为中心在KDTree中搜索若干近邻点,基于这些近邻点进行曲面重建。根据曲面重建结果,设计一种计算几何方法导出伪点云修正后的精确坐标。最后,将修正后的伪点云与原始激光雷达点云融合得到稠密化点云。结果实验结果表明,稠密化的点云在视觉上具有较好的质量,物体具有更加完整的形状和轮廓,并且在KITTI(Karlsruhe Institute of Technology and Toyota Technological Institute)数据集上提升了3D目标检测精度。在使用该数据增强方法后,KITTI数据集下AVOD(aggregate view object detection)检测方法的AP3D-Easy(average precision of 3D object detection on easy setting)提升了8.25%,AVOD-FPN(aggregate view object detection with feature pyramid network)检测方法的APBEV-Hard(average precision of bird’s eye view on hard setting)提升了7.14%。结论本文提出的激光雷达数据增强算法,实现了点云的稠密化处理,并使3D目标检测结果更加精确。关键词:激光雷达;数据增强;点云稠密化;伪点云;地面分割;3D目标检测76|1124|0更新时间:2024-05-07
NCIG 2020
-
 摘要:随着航天航空遥感技术的飞速发展,立体式、多层次、多视角、全方位和全天候对地观测的时代已然到来。如何激活数据价值,更好地服务行业应用,满足快速增长的遥感应用需求,成为遥感企业面临的迫切课题。遥感图像处理软件作为遥感数据与行业应用的桥梁,在遥感产业化过程中发挥着不可替代的作用。本文概述了国内外遥感卫星数据和遥感软件发展历程,通过中国国产遥感图像处理软件——像素专家(pixel information expert,PIE)阐述了国产遥感软件的研制进展、典型应用和未来技术发展方向。PIE软件具有多源遥感载荷全方位支持、全谱段要素信息智能提取、多行业全业务链深度融合、海量遥感数据快速处理和自主产权程序完全可控等5大核心能力。未来将加强与大数据、云计算和人工智能等技术前沿领域的交叉融合,提升遥感数据分析处理、知识挖掘与决策支持能力,实现遥感数据的按需获取快速传输和专题信息聚焦服务。关键词:国产遥感软件;像素专家(PIE);发展方向;云服务平台;人工智能;大数据209|380|4更新时间:2024-05-07
摘要:随着航天航空遥感技术的飞速发展,立体式、多层次、多视角、全方位和全天候对地观测的时代已然到来。如何激活数据价值,更好地服务行业应用,满足快速增长的遥感应用需求,成为遥感企业面临的迫切课题。遥感图像处理软件作为遥感数据与行业应用的桥梁,在遥感产业化过程中发挥着不可替代的作用。本文概述了国内外遥感卫星数据和遥感软件发展历程,通过中国国产遥感图像处理软件——像素专家(pixel information expert,PIE)阐述了国产遥感软件的研制进展、典型应用和未来技术发展方向。PIE软件具有多源遥感载荷全方位支持、全谱段要素信息智能提取、多行业全业务链深度融合、海量遥感数据快速处理和自主产权程序完全可控等5大核心能力。未来将加强与大数据、云计算和人工智能等技术前沿领域的交叉融合,提升遥感数据分析处理、知识挖掘与决策支持能力,实现遥感数据的按需获取快速传输和专题信息聚焦服务。关键词:国产遥感软件;像素专家(PIE);发展方向;云服务平台;人工智能;大数据209|380|4更新时间:2024-05-07
前沿进展
- 地址:北京市海淀区北四环西路19号中科院电子所主楼223室 邮编:100190
- 联系电话:010-58887035/58887030/58887418 Email:jig@aircas.ac.cn
- 技术支持由北京北大方正电子有限公司提供 京ICP备05080539号-4
 京公网安备11010802024621
京公网安备11010802024621 - 本系统建议在Chrome、 IE9+ 以上版本浏览器阅读本站内容,360浏览器请切换至极速模式
- Cookies帮助我们提供服务并提供个性化体验。使用本网站,即表示您同意我们使用Cookies

0