
最新刊期
2021 年 第 26 卷 第 11 期

-
 摘要:随着我国电网系统的不断发展,基层巡检作业负担越来越重,运维成本越来越高,如何实现输电线路部件缺陷的智能化检测变得愈发重要。同时,由于国家《新一代人工智能发展规划》的提出和国家电网"数字新基建"的部署,人工智能应用于电力设备运维的相关技术得到了快速发展,对输电线路部件视觉缺陷准确检测成为亟待解决的关键问题之一。早期基于图像处理和特征工程的部件视觉缺陷检测方法对图像质量的要求较高,无法真正应用于现实复杂的输电线路作业环境;随着深度学习的兴起,基于深度学习的检测模型可以有效地将部件目标及其缺陷从复杂的输电线路航拍图像中提取出来,既节省了人工设计特征的时间,又在性能上达到了显著提升,因此逐渐成为主流研究方法。本文首先描述了基于传统算法的输电线路关键部件视觉缺陷检测技术,回顾了深度学习的发展过程并分析了深度学习在缺陷检测领域的优缺点;围绕输电线路上3个重要的部件:绝缘子、金具以及螺栓,介绍了其定位与缺陷检测的研究现状;分析了输电线路部件缺陷检测中研究的样本不平衡问题、小目标检测问题、细粒度检测问题等几个关键问题;分析了符合电网巡检任务复杂场景需求和故障诊断标准的输电线路部件缺陷检测技术的未来发展趋势。关键词:电力设备运维;输电线路部件;视觉缺陷检测;深度学习;目标检测;知识引导351|408|29更新时间:2024-05-07
摘要:随着我国电网系统的不断发展,基层巡检作业负担越来越重,运维成本越来越高,如何实现输电线路部件缺陷的智能化检测变得愈发重要。同时,由于国家《新一代人工智能发展规划》的提出和国家电网"数字新基建"的部署,人工智能应用于电力设备运维的相关技术得到了快速发展,对输电线路部件视觉缺陷准确检测成为亟待解决的关键问题之一。早期基于图像处理和特征工程的部件视觉缺陷检测方法对图像质量的要求较高,无法真正应用于现实复杂的输电线路作业环境;随着深度学习的兴起,基于深度学习的检测模型可以有效地将部件目标及其缺陷从复杂的输电线路航拍图像中提取出来,既节省了人工设计特征的时间,又在性能上达到了显著提升,因此逐渐成为主流研究方法。本文首先描述了基于传统算法的输电线路关键部件视觉缺陷检测技术,回顾了深度学习的发展过程并分析了深度学习在缺陷检测领域的优缺点;围绕输电线路上3个重要的部件:绝缘子、金具以及螺栓,介绍了其定位与缺陷检测的研究现状;分析了输电线路部件缺陷检测中研究的样本不平衡问题、小目标检测问题、细粒度检测问题等几个关键问题;分析了符合电网巡检任务复杂场景需求和故障诊断标准的输电线路部件缺陷检测技术的未来发展趋势。关键词:电力设备运维;输电线路部件;视觉缺陷检测;深度学习;目标检测;知识引导351|408|29更新时间:2024-05-07 -
 摘要:目的在电力系统中,准确地识别绝缘子目标是保障输电线路正常运行的重要前提。针对传统方法无法自动提取绝缘子特征,以及深度学习网络提取绝缘子语义信息不足的问题,提出了一种基于改进多尺度网络的绝缘子识别模型,同时满足自动识别和增强语义信息的要求。方法改进工作主要分为3部分,首先,采用特征融合的方法,增强特征提取网络生成的特征图的语义信息;其次,特征提取后,为了避免经过多次卷积、池化操作,较小尺度绝缘子语义信息损失严重,因此,扩大网络中的小尺度特征图,进一步丰富较小尺度绝缘子的语义信息;最后,为了更好地识别尺度差异较大的绝缘子,改进锚点框的参数。完成改进工作后,通过边框回归得到绝缘子的准确位置信息,最终识别出绝缘子。结果实验数据集由复合、玻璃和陶瓷3种材质的绝缘子构成,共有4 350幅图像。在实验数据集上进行识别,实验结果与3种不同结构的多尺度网络模型相比,模型结构最优,识别准确率为96.28%,与传统的Faster RCNN(faster region convolutional neural network)、改进的Faster RCNN等方法相比,识别准确率提高了1.98%~11.99%不等。结论本文提出的改进模型使绝缘子识别准确率显著提高,为之后的输电线路检测工作夯实基础。关键词:尺度缩放网络;绝缘子识别;语义信息;特征融合;卷积;池化;锚点框122|328|3更新时间:2024-05-07
摘要:目的在电力系统中,准确地识别绝缘子目标是保障输电线路正常运行的重要前提。针对传统方法无法自动提取绝缘子特征,以及深度学习网络提取绝缘子语义信息不足的问题,提出了一种基于改进多尺度网络的绝缘子识别模型,同时满足自动识别和增强语义信息的要求。方法改进工作主要分为3部分,首先,采用特征融合的方法,增强特征提取网络生成的特征图的语义信息;其次,特征提取后,为了避免经过多次卷积、池化操作,较小尺度绝缘子语义信息损失严重,因此,扩大网络中的小尺度特征图,进一步丰富较小尺度绝缘子的语义信息;最后,为了更好地识别尺度差异较大的绝缘子,改进锚点框的参数。完成改进工作后,通过边框回归得到绝缘子的准确位置信息,最终识别出绝缘子。结果实验数据集由复合、玻璃和陶瓷3种材质的绝缘子构成,共有4 350幅图像。在实验数据集上进行识别,实验结果与3种不同结构的多尺度网络模型相比,模型结构最优,识别准确率为96.28%,与传统的Faster RCNN(faster region convolutional neural network)、改进的Faster RCNN等方法相比,识别准确率提高了1.98%~11.99%不等。结论本文提出的改进模型使绝缘子识别准确率显著提高,为之后的输电线路检测工作夯实基础。关键词:尺度缩放网络;绝缘子识别;语义信息;特征融合;卷积;池化;锚点框122|328|3更新时间:2024-05-07 -
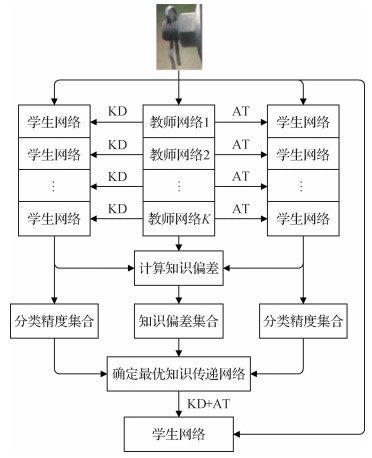 摘要:目的输电线路螺栓图像具有分辨率低和视觉信息较差的特点,针对螺栓缺陷图像分类时教师网络(大模型)参数量大、学生网络(小模型)分类精度低的问题,提出了一种最优知识传递宽残差网络输电线路螺栓缺陷图像分类方法,来弥补使用大小模型进行分类任务的局限性。方法首先改变大模型宽度,即拓宽网络特征表达维度来增加向小模型传递的螺栓缺陷知识和简化小模型结构至3个残差块;然后为了选出传递螺栓缺陷知识性能最优的大模型,提出知识偏差的概念来可视化大模型向小模型螺栓缺陷知识传递的程度,综合分析不同宽度大模型利用知识蒸馏算法与注意力转移算法分别指导小模型训练后的分类准确率,并用知识偏差来确定最优知识传递模型;最后将最优知识传递模型利用知识蒸馏算法与注意力转移算法相结合指导小模型训练,尽可能提升小模型的螺栓缺陷分类性能。结果在自建螺栓缺陷图像分类数据集上进行了验证,结果表明宽度为5的大模型向小模型传递螺栓缺陷知识性能最优,使小模型的螺栓缺陷分类准确率提高了5.56%,小模型与最优大模型的分类准确率只差2.17%,知识偏差为0.28,且小模型的参数量仅为大模型参数量的0.56%。结论本文提出的最优知识传递宽残差网络输电线路螺栓缺陷图像分类方法,弥补了大小模型螺栓缺陷图像分类的局限性,实现了精度与资源消耗的平衡。关键词:螺栓缺陷分类;最优知识传递;知识偏差;知识蒸馏;注意力转移85|160|1更新时间:2024-05-07
摘要:目的输电线路螺栓图像具有分辨率低和视觉信息较差的特点,针对螺栓缺陷图像分类时教师网络(大模型)参数量大、学生网络(小模型)分类精度低的问题,提出了一种最优知识传递宽残差网络输电线路螺栓缺陷图像分类方法,来弥补使用大小模型进行分类任务的局限性。方法首先改变大模型宽度,即拓宽网络特征表达维度来增加向小模型传递的螺栓缺陷知识和简化小模型结构至3个残差块;然后为了选出传递螺栓缺陷知识性能最优的大模型,提出知识偏差的概念来可视化大模型向小模型螺栓缺陷知识传递的程度,综合分析不同宽度大模型利用知识蒸馏算法与注意力转移算法分别指导小模型训练后的分类准确率,并用知识偏差来确定最优知识传递模型;最后将最优知识传递模型利用知识蒸馏算法与注意力转移算法相结合指导小模型训练,尽可能提升小模型的螺栓缺陷分类性能。结果在自建螺栓缺陷图像分类数据集上进行了验证,结果表明宽度为5的大模型向小模型传递螺栓缺陷知识性能最优,使小模型的螺栓缺陷分类准确率提高了5.56%,小模型与最优大模型的分类准确率只差2.17%,知识偏差为0.28,且小模型的参数量仅为大模型参数量的0.56%。结论本文提出的最优知识传递宽残差网络输电线路螺栓缺陷图像分类方法,弥补了大小模型螺栓缺陷图像分类的局限性,实现了精度与资源消耗的平衡。关键词:螺栓缺陷分类;最优知识传递;知识偏差;知识蒸馏;注意力转移85|160|1更新时间:2024-05-07 -
 摘要:目的螺栓是确保输电线路安全牢靠的基石,螺栓缺销、松动和锈蚀等缺陷是造成输电线路损坏甚至重大事故的重要原因之一。本文针对螺栓缺陷存在视觉不可分的问题,提出了一种改进NTS-Net(navigator-teacher-scrutinizer network)的螺栓属性多标签分类方法。方法为了增强模型对不规则轮廓的处理能力,采用可变形卷积的ResNet-50网络作为特征提取网络从原图中提取全局特征。利用NTS-Net学习得到图像信息量最大的判别性局部区域。为了考虑不同局部特征对不同属性标签的不同影响,在局部特征与全局特征融合时引入通道注意力机制,提取特征的通道权重,获取关键通道特征以改善多标签分类效果。结果实验结果表明,本文在螺栓多属性分类数据集上的平均分类精确率为84.5%,比采用传统的多标签分类精确率提升了10%~20%。结论本文通过可变形卷积提升网络的特征提取能力以及引入通道注意力机制实现了对NTS-Net提供的局部特征的高效利用,为解决螺栓多属性分类中存在的问题提供了一种新的思路。关键词:螺栓缺陷;可变形卷积;NTS-Net网络;多标签分类;通道注意力81|30|5更新时间:2024-05-07
摘要:目的螺栓是确保输电线路安全牢靠的基石,螺栓缺销、松动和锈蚀等缺陷是造成输电线路损坏甚至重大事故的重要原因之一。本文针对螺栓缺陷存在视觉不可分的问题,提出了一种改进NTS-Net(navigator-teacher-scrutinizer network)的螺栓属性多标签分类方法。方法为了增强模型对不规则轮廓的处理能力,采用可变形卷积的ResNet-50网络作为特征提取网络从原图中提取全局特征。利用NTS-Net学习得到图像信息量最大的判别性局部区域。为了考虑不同局部特征对不同属性标签的不同影响,在局部特征与全局特征融合时引入通道注意力机制,提取特征的通道权重,获取关键通道特征以改善多标签分类效果。结果实验结果表明,本文在螺栓多属性分类数据集上的平均分类精确率为84.5%,比采用传统的多标签分类精确率提升了10%~20%。结论本文通过可变形卷积提升网络的特征提取能力以及引入通道注意力机制实现了对NTS-Net提供的局部特征的高效利用,为解决螺栓多属性分类中存在的问题提供了一种新的思路。关键词:螺栓缺陷;可变形卷积;NTS-Net网络;多标签分类;通道注意力81|30|5更新时间:2024-05-07 -
 摘要:目的螺栓是输电线路上最普遍、数量最多的部件,螺栓缺陷检测是输电线路视觉检测任务的一大难点。针对螺栓目标存在背景复杂、目标过小、不同类别之间差异小以及精细特征难以提取的问题,提出一种双注意力机制方法,分别对不同尺度和不同位置的视觉特征进行分析和增强。方法对于不同尺度的特征,网络使用不同尺度的特征图计算出相应的注意力图,然后将相邻层的注意力图差异性作为正则化项加入网络中,从而增强螺栓区域的精细特征。对于不同位置的特征,先使用特征图计算出图像的空间注意力图,注意力图中每个元素表示两个空间位置的相似程度,然后利用注意力图将局部特征与全局特征融合,从而在全局视野上增强相似的区域,达到增大螺栓与背景的特征差异程度,实现提高螺栓区域的预测效果。结果本文在航拍输电线路典型螺栓数据集上进行测试,与基线相比,结合双注意力机制的航拍输电线路螺栓检测方法的平均准确率提高了2.21%,其中正常螺栓类提升了0.29%,缺销螺栓类提升了5.23%,螺母缺失螺栓类提升了1.1%。结论本文提出的基于双注意力机制的航拍输电线路螺栓缺陷检测方法取得了良好的效果,有效避免了螺栓缺陷检测中的误判漏判问题,为进一步对输电线路其他缺陷任务奠定了良好的基础。关键词:双注意力机制;多尺度;空间位置;螺栓缺陷检测;深度学习132|63|16更新时间:2024-05-07
摘要:目的螺栓是输电线路上最普遍、数量最多的部件,螺栓缺陷检测是输电线路视觉检测任务的一大难点。针对螺栓目标存在背景复杂、目标过小、不同类别之间差异小以及精细特征难以提取的问题,提出一种双注意力机制方法,分别对不同尺度和不同位置的视觉特征进行分析和增强。方法对于不同尺度的特征,网络使用不同尺度的特征图计算出相应的注意力图,然后将相邻层的注意力图差异性作为正则化项加入网络中,从而增强螺栓区域的精细特征。对于不同位置的特征,先使用特征图计算出图像的空间注意力图,注意力图中每个元素表示两个空间位置的相似程度,然后利用注意力图将局部特征与全局特征融合,从而在全局视野上增强相似的区域,达到增大螺栓与背景的特征差异程度,实现提高螺栓区域的预测效果。结果本文在航拍输电线路典型螺栓数据集上进行测试,与基线相比,结合双注意力机制的航拍输电线路螺栓检测方法的平均准确率提高了2.21%,其中正常螺栓类提升了0.29%,缺销螺栓类提升了5.23%,螺母缺失螺栓类提升了1.1%。结论本文提出的基于双注意力机制的航拍输电线路螺栓缺陷检测方法取得了良好的效果,有效避免了螺栓缺陷检测中的误判漏判问题,为进一步对输电线路其他缺陷任务奠定了良好的基础。关键词:双注意力机制;多尺度;空间位置;螺栓缺陷检测;深度学习132|63|16更新时间:2024-05-07 -
 摘要:目的电力线在航拍图像中的提取是智能巡检的重要研究内容,基于深度学习的图像语义分割模型在此领域的应用已有较好的效果。然而,图像训练集容量较小和预训练模型计算量过大是两个待解决的问题。方法首先使用生成对抗网络模型结合圆锥曲线和色相扰动进行数据集增强,对3种不同的损失函数以及两个色彩空间所训练的U-Net网络模型进行对比,给出最优组合。然后提出了一种联合一阶泰勒展开和输出通道2范数的显著度指标,对上述完整模型使用改进的通道级参数正则化方法来稀疏化模型权重,并对稀疏模型进行网络剪枝和重训练以降低模型的计算量。最后,在判决阈值的选择上,使用自适应阈值替代固定值法以增强对亮度变化的鲁棒性。结果实验结果表明,提出的灰度输入轻量化模型IoU(intersection-over-union)指标为0.459,但其参数量和计算量相当于IoU指标为0.573的可见光完整模型的0.03%和3.05%,且自适应阈值法在合适的光照变化范围内能达到该条件下最优阈值的相似结果。结论验证了不同数据集增强方法、损失函数、输入色彩空间组合对模型收敛性能、训练速度和过拟合程度的影响,给出了各色彩空间内的最佳组合。同时,采用网络剪枝的方式极大降低了电力线语义分割网络的参数量和运算量,对网络模型的落地部署有积极的作用。关键词:智能巡检;图像语义分割;稀疏正则化;网络剪枝;生成对抗网络(GAN)86|76|4更新时间:2024-05-07
摘要:目的电力线在航拍图像中的提取是智能巡检的重要研究内容,基于深度学习的图像语义分割模型在此领域的应用已有较好的效果。然而,图像训练集容量较小和预训练模型计算量过大是两个待解决的问题。方法首先使用生成对抗网络模型结合圆锥曲线和色相扰动进行数据集增强,对3种不同的损失函数以及两个色彩空间所训练的U-Net网络模型进行对比,给出最优组合。然后提出了一种联合一阶泰勒展开和输出通道2范数的显著度指标,对上述完整模型使用改进的通道级参数正则化方法来稀疏化模型权重,并对稀疏模型进行网络剪枝和重训练以降低模型的计算量。最后,在判决阈值的选择上,使用自适应阈值替代固定值法以增强对亮度变化的鲁棒性。结果实验结果表明,提出的灰度输入轻量化模型IoU(intersection-over-union)指标为0.459,但其参数量和计算量相当于IoU指标为0.573的可见光完整模型的0.03%和3.05%,且自适应阈值法在合适的光照变化范围内能达到该条件下最优阈值的相似结果。结论验证了不同数据集增强方法、损失函数、输入色彩空间组合对模型收敛性能、训练速度和过拟合程度的影响,给出了各色彩空间内的最佳组合。同时,采用网络剪枝的方式极大降低了电力线语义分割网络的参数量和运算量,对网络模型的落地部署有积极的作用。关键词:智能巡检;图像语义分割;稀疏正则化;网络剪枝;生成对抗网络(GAN)86|76|4更新时间:2024-05-07
电力视觉前沿技术
-
 摘要:智能视觉系统虽然在大规模信息的特征检测、提取与匹配等处理上具备一定优势,但是在深层次认知上仍存在不确定性和脆弱性,尤其是针对视觉感知基础上的视觉认知任务,相关数理逻辑和图像处理方法并未实现质的突破,智能算法难以取代人类执行较为复杂的理解、推理、决策和学习等操作。为助力智能视觉感知和认知技术的进一步发展,本文总结了混合增强智能在视觉认知领域的应用现状,给出了混合增强视觉认知的基本架构,并对可纳入该架构下的应用领域及关键技术进行了综述。首先,在分析智能视觉感知内涵和基本范畴的基础上,融合人的视觉感知与心理认知,探讨混合增强视觉认知的定义、范畴及其深化过程,对不同的视觉信息处理阶段进行对比,进而在分析相关认知模型发展现状的基础上,构建混合增强视觉认知的基本框架。该架构不仅可依靠智能算法进行快速地检测、识别、理解等处理,最大限度地挖掘"机"的计算潜能,而且可凭借适时、适当的人工推理、预测和决策有效增强系统认知的准确性和可靠性,最大程度地发挥人的认知优势。其次,分别从混合增强的视觉监测、视觉驾驶、视觉决策以及视觉共享等4个领域探讨可纳入该架构的代表性应用及存在的问题,指出混合增强视觉认知架构是现有技术条件下能够更好地发挥计算机效能、减轻人处理信息压力的方式。最后,基于高、中、低计算机视觉处理技术体系,分析混合增强视觉认知架构中部分中高级视觉处理技术的宏观、微观关系,重点综述可视化分析、视觉增强、视觉注意、视觉理解、视觉推理、交互式学习以及认知评估等关键技术。混合增强视觉认知架构有助于突破当前视觉信息认知"弱人工智能"的瓶颈,将有力促进智能视觉系统向人机深度融合方向发展。下一步,还需在纯粹的基础创新、高效的人机交互、柔性的连接通路等方面开展更加深入的研究。关键词:视觉认知;视觉感知;智能视觉感知;混合增强视觉认知;人机融合111|231|1更新时间:2024-05-07
摘要:智能视觉系统虽然在大规模信息的特征检测、提取与匹配等处理上具备一定优势,但是在深层次认知上仍存在不确定性和脆弱性,尤其是针对视觉感知基础上的视觉认知任务,相关数理逻辑和图像处理方法并未实现质的突破,智能算法难以取代人类执行较为复杂的理解、推理、决策和学习等操作。为助力智能视觉感知和认知技术的进一步发展,本文总结了混合增强智能在视觉认知领域的应用现状,给出了混合增强视觉认知的基本架构,并对可纳入该架构下的应用领域及关键技术进行了综述。首先,在分析智能视觉感知内涵和基本范畴的基础上,融合人的视觉感知与心理认知,探讨混合增强视觉认知的定义、范畴及其深化过程,对不同的视觉信息处理阶段进行对比,进而在分析相关认知模型发展现状的基础上,构建混合增强视觉认知的基本框架。该架构不仅可依靠智能算法进行快速地检测、识别、理解等处理,最大限度地挖掘"机"的计算潜能,而且可凭借适时、适当的人工推理、预测和决策有效增强系统认知的准确性和可靠性,最大程度地发挥人的认知优势。其次,分别从混合增强的视觉监测、视觉驾驶、视觉决策以及视觉共享等4个领域探讨可纳入该架构的代表性应用及存在的问题,指出混合增强视觉认知架构是现有技术条件下能够更好地发挥计算机效能、减轻人处理信息压力的方式。最后,基于高、中、低计算机视觉处理技术体系,分析混合增强视觉认知架构中部分中高级视觉处理技术的宏观、微观关系,重点综述可视化分析、视觉增强、视觉注意、视觉理解、视觉推理、交互式学习以及认知评估等关键技术。混合增强视觉认知架构有助于突破当前视觉信息认知"弱人工智能"的瓶颈,将有力促进智能视觉系统向人机深度融合方向发展。下一步,还需在纯粹的基础创新、高效的人机交互、柔性的连接通路等方面开展更加深入的研究。关键词:视觉认知;视觉感知;智能视觉感知;混合增强视觉认知;人机融合111|231|1更新时间:2024-05-07 -
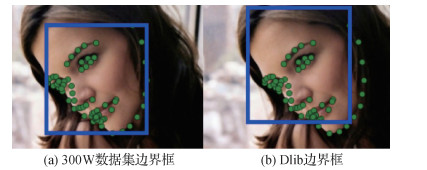 摘要:人脸特征点定位是根据输入的人脸数据自动定位出预先按人脸生理特征定义的眼角、鼻尖、嘴角和脸部轮廓等面部关键特征点,在人脸识别和分析等系统中起着至关重要的作用。本文对基于深度学习的人脸特征点自动定位进行综述,阐释了人脸特征点自动定位的含义,归纳了目前常用的人脸公开数据集,系统阐述了针对2维和3维数据特征点的自动定位方法,总结了各方法的研究现状及其应用,分析了当前人脸特征点自动定位技术在深度学习应用中的现状、存在问题及发展趋势。在公开的2维和3维人脸数据集上对不同方法进行了比较。通过研究可以看出,基于深度学习的2维人脸特征点的自动定位方法研究相对比较深入,而3维人脸特征点定位方法的研究在模型表示、处理方法和样本数量上都存在挑战。未来基于深度学习的3维人脸特征点定位方法将成为研究趋势。关键词:深度学习;2维人脸特征点定位;3维人脸特征点定位;卷积神经网络(CNN);配准72|44|0更新时间:2024-05-07
摘要:人脸特征点定位是根据输入的人脸数据自动定位出预先按人脸生理特征定义的眼角、鼻尖、嘴角和脸部轮廓等面部关键特征点,在人脸识别和分析等系统中起着至关重要的作用。本文对基于深度学习的人脸特征点自动定位进行综述,阐释了人脸特征点自动定位的含义,归纳了目前常用的人脸公开数据集,系统阐述了针对2维和3维数据特征点的自动定位方法,总结了各方法的研究现状及其应用,分析了当前人脸特征点自动定位技术在深度学习应用中的现状、存在问题及发展趋势。在公开的2维和3维人脸数据集上对不同方法进行了比较。通过研究可以看出,基于深度学习的2维人脸特征点的自动定位方法研究相对比较深入,而3维人脸特征点定位方法的研究在模型表示、处理方法和样本数量上都存在挑战。未来基于深度学习的3维人脸特征点定位方法将成为研究趋势。关键词:深度学习;2维人脸特征点定位;3维人脸特征点定位;卷积神经网络(CNN);配准72|44|0更新时间:2024-05-07
综述
-
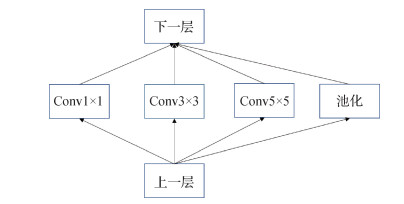 摘要:目的针对以往基于深度学习的图像超分辨率重建方法单纯加深网络、上采样信息损失和高频信息重建困难等问题,提出一种基于多尺度特征复用混合注意力网络模型用于图像的超分辨率重建。方法网络主要由预处理模块、多尺度特征复用混合注意力模块、上采样模块、补偿重建模块和重建模块5部分组成。第1部分是预处理模块,该模块使用一个卷积层来提取浅层特征和扩张特征图的通道数。第2部分是多尺度特征复用混合注意力模块,该模块加入了多路网路、混合注意力机制和长短跳连接,以此来进一步扩大特征图的感受野、提高多尺度特征的复用和加强高频信息的重建。第3部分是上采样模块,该模块使用亚像素方法将特征图上采样到目标图像尺寸。第4部分是补偿重建模块,该模块由卷积层和混合注意力机制组成,用来对经过上采样的特征图进行特征补偿和稳定模型训练。第5部分是重建模块,该模块由一个卷积层组成,用来将特征图的通道数恢复至原来数量,以此得到重建后的高分辨率图像。结果在同等规模模型的比较中,以峰值信噪比(peak signal-to-noise ratio,PSNR)和结构相似度(structural similarity index measure,SSIM)作为评价指标来评价算法性能,在Set5、Set14、BSD100(Berkeley segmentation dataset)和Urban100的基准测试集上进行测试。当缩放尺度因子为3时,各测试集上的PSNR/SSIM依次为34.40 dB/0.927 3,30.35 dB/0.842 7,29.11 dB/0.805 2和28.23 dB/0.854 0,相比其他模型有一定提升。结论量化和视觉的实验结果表明,本文模型重建得到的高分辨率图像不仅在重建边缘和纹理信息有很好的改善,而且在PSNR和SSIM客观评价指标上也有一定的提高。关键词:超分辨率重建;多尺度特征复用;混合注意力;特征补偿;边缘60|35|3更新时间:2024-05-07
摘要:目的针对以往基于深度学习的图像超分辨率重建方法单纯加深网络、上采样信息损失和高频信息重建困难等问题,提出一种基于多尺度特征复用混合注意力网络模型用于图像的超分辨率重建。方法网络主要由预处理模块、多尺度特征复用混合注意力模块、上采样模块、补偿重建模块和重建模块5部分组成。第1部分是预处理模块,该模块使用一个卷积层来提取浅层特征和扩张特征图的通道数。第2部分是多尺度特征复用混合注意力模块,该模块加入了多路网路、混合注意力机制和长短跳连接,以此来进一步扩大特征图的感受野、提高多尺度特征的复用和加强高频信息的重建。第3部分是上采样模块,该模块使用亚像素方法将特征图上采样到目标图像尺寸。第4部分是补偿重建模块,该模块由卷积层和混合注意力机制组成,用来对经过上采样的特征图进行特征补偿和稳定模型训练。第5部分是重建模块,该模块由一个卷积层组成,用来将特征图的通道数恢复至原来数量,以此得到重建后的高分辨率图像。结果在同等规模模型的比较中,以峰值信噪比(peak signal-to-noise ratio,PSNR)和结构相似度(structural similarity index measure,SSIM)作为评价指标来评价算法性能,在Set5、Set14、BSD100(Berkeley segmentation dataset)和Urban100的基准测试集上进行测试。当缩放尺度因子为3时,各测试集上的PSNR/SSIM依次为34.40 dB/0.927 3,30.35 dB/0.842 7,29.11 dB/0.805 2和28.23 dB/0.854 0,相比其他模型有一定提升。结论量化和视觉的实验结果表明,本文模型重建得到的高分辨率图像不仅在重建边缘和纹理信息有很好的改善,而且在PSNR和SSIM客观评价指标上也有一定的提高。关键词:超分辨率重建;多尺度特征复用;混合注意力;特征补偿;边缘60|35|3更新时间:2024-05-07
图像处理和编码
-
 摘要:目的基于深度学习的图像哈希检索是图像检索领域的热点研究问题。现有的深度哈希方法忽略了深度图像特征在深度哈希函数训练中的指导作用,并且由于采用松弛优化,不能有效处理二进制量化误差较大导致的生成次优哈希码的问题。对此,提出一种自监督的深度离散哈希方法(self-supervised deep discrete hashing,SSDDH)。方法利用卷积神经网络提取的深度特征矩阵和图像标签矩阵,计算得到二进制哈希码并作为自监督信息指导深度哈希函数的训练。构造成对损失函数,同时保持连续哈希码之间相似性以及连续哈希码与二进制哈希码之间的相似性,并利用离散优化算法求解得到哈希码,有效降低二进制量化误差。结果将本文方法在3个公共数据集上进行测试,并与其他哈希算法进行实验对比。在CIFAR-10、NUS-WIDE(web image dataset from National University of Singapore)和Flickr数据集上,本文方法的检索精度均为最高,本文方法的准确率比次优算法DPSH(deep pairwise-supervised hashing)分别高3%、3%和1%。结论本文提出的基于自监督的深度离散哈希的图像检索方法能有效利用深度特征信息和图像标签信息,并指导深度哈希函数的训练,且能有效减少二进制量化误差。实验结果表明,SSDDH在平均准确率上优于其他同类算法,可以有效完成图像检索任务。关键词:深度学习;图像检索;哈希学习;自监督;离散优化99|58|2更新时间:2024-05-07
摘要:目的基于深度学习的图像哈希检索是图像检索领域的热点研究问题。现有的深度哈希方法忽略了深度图像特征在深度哈希函数训练中的指导作用,并且由于采用松弛优化,不能有效处理二进制量化误差较大导致的生成次优哈希码的问题。对此,提出一种自监督的深度离散哈希方法(self-supervised deep discrete hashing,SSDDH)。方法利用卷积神经网络提取的深度特征矩阵和图像标签矩阵,计算得到二进制哈希码并作为自监督信息指导深度哈希函数的训练。构造成对损失函数,同时保持连续哈希码之间相似性以及连续哈希码与二进制哈希码之间的相似性,并利用离散优化算法求解得到哈希码,有效降低二进制量化误差。结果将本文方法在3个公共数据集上进行测试,并与其他哈希算法进行实验对比。在CIFAR-10、NUS-WIDE(web image dataset from National University of Singapore)和Flickr数据集上,本文方法的检索精度均为最高,本文方法的准确率比次优算法DPSH(deep pairwise-supervised hashing)分别高3%、3%和1%。结论本文提出的基于自监督的深度离散哈希的图像检索方法能有效利用深度特征信息和图像标签信息,并指导深度哈希函数的训练,且能有效减少二进制量化误差。实验结果表明,SSDDH在平均准确率上优于其他同类算法,可以有效完成图像检索任务。关键词:深度学习;图像检索;哈希学习;自监督;离散优化99|58|2更新时间:2024-05-07 -
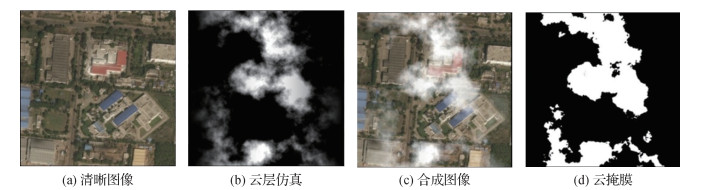 摘要:目的道路提取是常见的遥感应用之一。现有的基于深度卷积网络的道路提取方法往往未考虑云遮挡给道路提取带来的影响,且提取网络模型较大,不利于在移动端部署,同时缺乏用于云遮挡场景下的道路提取数据集。对此,本文提出一种轻量化的UNet网络(lightweight UNet,L-UNet),高效地实现云遮挡下的道路提取。方法通过柏林噪声模拟云层以扩展现有道路提取数据集,进而训练L-UNet。使用移动翻转瓶颈卷积模块作为特征提取的主要结构,在深度可分离卷积的基础上加入扩展卷积和压缩激励模块,在减少参数量的同时大幅提升了分割效果。结果在DeepGlobe道路提取扩展数据集的测试中,与D-LinkNet相比,L-UNet的交并比(intersection over union,IoU)提升了1.97%,而参数量仅为D-LinkNet的1/5。在真实云遮挡遥感图像道路提取测试中,L-UNet的性能仍然最优,与D-LinkNet和UNet相比,IoU值分别提高19.47%和31.87%。结论L-UNet网络具有一定的云遮挡区域下道路标签生成能力,虽然在模拟云遮挡数据集下训练得到,但对于真实云遮挡仍具有较强的鲁棒性。L-UNet模型参数量很小,易于嵌入移动端。关键词:道路提取;轻量化UNet(L-UNet);遥感图像;云层遮挡仿真;深度学习137|358|2更新时间:2024-05-07
摘要:目的道路提取是常见的遥感应用之一。现有的基于深度卷积网络的道路提取方法往往未考虑云遮挡给道路提取带来的影响,且提取网络模型较大,不利于在移动端部署,同时缺乏用于云遮挡场景下的道路提取数据集。对此,本文提出一种轻量化的UNet网络(lightweight UNet,L-UNet),高效地实现云遮挡下的道路提取。方法通过柏林噪声模拟云层以扩展现有道路提取数据集,进而训练L-UNet。使用移动翻转瓶颈卷积模块作为特征提取的主要结构,在深度可分离卷积的基础上加入扩展卷积和压缩激励模块,在减少参数量的同时大幅提升了分割效果。结果在DeepGlobe道路提取扩展数据集的测试中,与D-LinkNet相比,L-UNet的交并比(intersection over union,IoU)提升了1.97%,而参数量仅为D-LinkNet的1/5。在真实云遮挡遥感图像道路提取测试中,L-UNet的性能仍然最优,与D-LinkNet和UNet相比,IoU值分别提高19.47%和31.87%。结论L-UNet网络具有一定的云遮挡区域下道路标签生成能力,虽然在模拟云遮挡数据集下训练得到,但对于真实云遮挡仍具有较强的鲁棒性。L-UNet模型参数量很小,易于嵌入移动端。关键词:道路提取;轻量化UNet(L-UNet);遥感图像;云层遮挡仿真;深度学习137|358|2更新时间:2024-05-07 -
 摘要:目的当前的大型数据集,例如ImageNet,以及一些主流的网络模型,如ResNet等能直接高效地应用于正常场景的分类,但在雾天场景下则会出现较大的精度损失。雾天场景复杂多样,大量标注雾天数据成本过高,在现有条件下,高效地利用大量已有场景的标注数据和网络模型完成雾天场景下的分类识别任务至关重要。方法本文使用了一种低成本的数据增强方法,有效减小图像在像素域上的差异。基于特征多样性和特征对抗的思想,提出多尺度特征多对抗网络,通过提取数据的多尺度特征,增强特征在特征域分布的代表性,利用对抗机制,在多个特征上减少特征域上的分布差异。通过缩小像素域和特征域分布差异,进一步减小领域偏移,提升雾天场景的分类识别精度。结果在真实的多样性雾天场景数据上,通过消融实验,使用像素域数据增强方法后,带有标签的清晰图像数据在风格上更趋向于带雾图像,总的分类精度提升了8.2%,相比其他的数据增强方法,至少提升了6.3%,同时在特征域上使用多尺度特征多对抗网络,相比其他的网络,准确率至少提升了8.0%。结论像素域数据增强以及多尺度特征多对抗网络结合的雾天图像识别方法,综合考虑了像素域和特征域的领域分布差异,结合了多尺度的丰富特征信息,同时使用多对抗来缩小雾天数据的领域偏移,在真实多样性雾天数据集上获得了更好的图像分类识别效果。关键词:雾天场景;图像识别;多尺度特征;多对抗;领域偏移108|153|2更新时间:2024-05-07
摘要:目的当前的大型数据集,例如ImageNet,以及一些主流的网络模型,如ResNet等能直接高效地应用于正常场景的分类,但在雾天场景下则会出现较大的精度损失。雾天场景复杂多样,大量标注雾天数据成本过高,在现有条件下,高效地利用大量已有场景的标注数据和网络模型完成雾天场景下的分类识别任务至关重要。方法本文使用了一种低成本的数据增强方法,有效减小图像在像素域上的差异。基于特征多样性和特征对抗的思想,提出多尺度特征多对抗网络,通过提取数据的多尺度特征,增强特征在特征域分布的代表性,利用对抗机制,在多个特征上减少特征域上的分布差异。通过缩小像素域和特征域分布差异,进一步减小领域偏移,提升雾天场景的分类识别精度。结果在真实的多样性雾天场景数据上,通过消融实验,使用像素域数据增强方法后,带有标签的清晰图像数据在风格上更趋向于带雾图像,总的分类精度提升了8.2%,相比其他的数据增强方法,至少提升了6.3%,同时在特征域上使用多尺度特征多对抗网络,相比其他的网络,准确率至少提升了8.0%。结论像素域数据增强以及多尺度特征多对抗网络结合的雾天图像识别方法,综合考虑了像素域和特征域的领域分布差异,结合了多尺度的丰富特征信息,同时使用多对抗来缩小雾天数据的领域偏移,在真实多样性雾天数据集上获得了更好的图像分类识别效果。关键词:雾天场景;图像识别;多尺度特征;多对抗;领域偏移108|153|2更新时间:2024-05-07
图像分析和识别
-
 摘要:目的随着3维采集技术的飞速发展,点云在计算机视觉、自动驾驶和机器人等领域有着广泛的应用前景。深度学习作为人工智能领域的主流技术,在解决各种3维视觉问题上已表现出巨大潜力。现有基于深度学习的3维点云分类分割方法通常在聚合局部邻域特征的过程中选择邻域特征中的最大值特征,忽略了其他邻域特征中的有用信息。方法本文提出一种结合动态图卷积和空间注意力的点云分类分割方法(dynamic graph convolution spatial attention neural networks,DGCSA)。通过将动态图卷积模块与空间注意力模块相结合,实现更精确的点云分类分割效果。使用动态图卷积对点云数据进行K近邻构图并提取其边特征。在此基础上,针对局部邻域聚合过程中容易产生信息丢失的问题,设计了一种基于点的空间注意力(spatial attention,SA)模块,通过使用注意力机制自动学习出比最大值特征更具有代表性的局部特征,从而提高模型的分类分割精度。结果本文分别在ModelNet40、ShapeNetPart和S3DIS(Stanford Large-scale 3D Indoor Spaces Dataset)数据集上进行分类、实例分割和语义场景分割实验,验证模型的分类分割性能。实验结果表明,该方法在分类任务上整体分类精度达到93.4%;实例分割的平均交并比达到85.3%;在室内场景分割的6折交叉检验平均交并比达到59.1%,相比基准网络动态图卷积网络分别提高0.8%、0.2%和3.0%,有效改善了模型性能。结论使用动态图卷积模块提取点云特征,在聚合局部邻域特征中引入空间注意力机制,相较于使用最大值特征池化,可以更好地聚合邻域特征,有效提高了模型在点云上的分类、实例分割与室内场景语义分割的精度。关键词:点云;动态图卷积;空间注意力(SA);分类;分割150|129|6更新时间:2024-05-07
摘要:目的随着3维采集技术的飞速发展,点云在计算机视觉、自动驾驶和机器人等领域有着广泛的应用前景。深度学习作为人工智能领域的主流技术,在解决各种3维视觉问题上已表现出巨大潜力。现有基于深度学习的3维点云分类分割方法通常在聚合局部邻域特征的过程中选择邻域特征中的最大值特征,忽略了其他邻域特征中的有用信息。方法本文提出一种结合动态图卷积和空间注意力的点云分类分割方法(dynamic graph convolution spatial attention neural networks,DGCSA)。通过将动态图卷积模块与空间注意力模块相结合,实现更精确的点云分类分割效果。使用动态图卷积对点云数据进行K近邻构图并提取其边特征。在此基础上,针对局部邻域聚合过程中容易产生信息丢失的问题,设计了一种基于点的空间注意力(spatial attention,SA)模块,通过使用注意力机制自动学习出比最大值特征更具有代表性的局部特征,从而提高模型的分类分割精度。结果本文分别在ModelNet40、ShapeNetPart和S3DIS(Stanford Large-scale 3D Indoor Spaces Dataset)数据集上进行分类、实例分割和语义场景分割实验,验证模型的分类分割性能。实验结果表明,该方法在分类任务上整体分类精度达到93.4%;实例分割的平均交并比达到85.3%;在室内场景分割的6折交叉检验平均交并比达到59.1%,相比基准网络动态图卷积网络分别提高0.8%、0.2%和3.0%,有效改善了模型性能。结论使用动态图卷积模块提取点云特征,在聚合局部邻域特征中引入空间注意力机制,相较于使用最大值特征池化,可以更好地聚合邻域特征,有效提高了模型在点云上的分类、实例分割与室内场景语义分割的精度。关键词:点云;动态图卷积;空间注意力(SA);分类;分割150|129|6更新时间:2024-05-07 -
 摘要:目的在点云分类处理的各环节中,关键是准确描述点云的局部邻域结构并提取表达能力强的点云特征集合。为了改进传统邻域结构单尺度特征表达能力的有限性和多尺度特征的计算复杂性,本文提出了用于激光点云分类的稀疏体素金字塔邻域结构及对应的分类方法。方法通过对原始数据进行不同尺度下采样构建稀疏体素金字塔,并根据稀疏体素金字塔提取多尺度特征,利用随机森林分类器进行初始分类;构建无向图,利用直方图交集核计算邻域点之间连接边的权重,通过多标签图割算法优化分类结果。当体素金字塔的接收域增大时,邻域点密度随其距离中心点距离的增加而减小,有效减少了计算量。结果在地基Semantic3D数据集、车载点云数据和机载点云数据上进行实验,结果表明,在降低计算复杂性的前提下,本文方法的分类精度、准确性和鲁棒性达到了同类算法前列,验证了该框架作为点云分类基础框架的有效性。结论与类似方法相比,本文方法提取的多尺度特征既保持了点的局部结构信息,也更好地兼顾了较大尺度的点云结构特征,因而提升了点云分类的精度。关键词:点云分类;稀疏体素金字塔;多尺度特征;多标签图割;直方图交集核58|32|4更新时间:2024-05-07
摘要:目的在点云分类处理的各环节中,关键是准确描述点云的局部邻域结构并提取表达能力强的点云特征集合。为了改进传统邻域结构单尺度特征表达能力的有限性和多尺度特征的计算复杂性,本文提出了用于激光点云分类的稀疏体素金字塔邻域结构及对应的分类方法。方法通过对原始数据进行不同尺度下采样构建稀疏体素金字塔,并根据稀疏体素金字塔提取多尺度特征,利用随机森林分类器进行初始分类;构建无向图,利用直方图交集核计算邻域点之间连接边的权重,通过多标签图割算法优化分类结果。当体素金字塔的接收域增大时,邻域点密度随其距离中心点距离的增加而减小,有效减少了计算量。结果在地基Semantic3D数据集、车载点云数据和机载点云数据上进行实验,结果表明,在降低计算复杂性的前提下,本文方法的分类精度、准确性和鲁棒性达到了同类算法前列,验证了该框架作为点云分类基础框架的有效性。结论与类似方法相比,本文方法提取的多尺度特征既保持了点的局部结构信息,也更好地兼顾了较大尺度的点云结构特征,因而提升了点云分类的精度。关键词:点云分类;稀疏体素金字塔;多尺度特征;多标签图割;直方图交集核58|32|4更新时间:2024-05-07
图像理解和计算机视觉
-
 摘要:目的植物叶片形态复杂,在虚拟场景中很难真实表现。为了从信息量有限的单幅图像中恢复植物叶片的3维形状,本文基于从明暗恢复形状(shape from shading,SFS)的方法,利用亮度统计规律和植物形态特征恢复叶片的3维形状。方法在SFS的基础上,设计基于图像骨架的距离场偏置加强表面细节;针对SFS对恢复宏观几何形状的不足,提出根据图像亮度统计分布选取控制点控制表面宏观形状变化,并利用叶片中轴的距离场约束恢复宏观几何形状,每种方法对于表面宏观几何形状恢复的权重基于恢复的反射图和输入图像间的相似度设定;将表面细节添加到宏观几何形状上得到目标对象的3维形状。结果选取植物叶片图像进行实验,并与其他方法进行比较,实验结果表明本文方法增强了表面细节显示,并有明显的宏观几何形状变化。同时为了验证本文方法对其他物体表面细节恢复的适用性,分别对硬币和恐龙恢复表面细节,实验结果表明提出的增强表面细节的方法同样适用于其他物体。结论针对单幅植物叶片图像的3维重建,在SFS的基础上提出了根据骨架特征加强表面细节,根据图像亮度统计分布和叶片中轴距离场约束共同恢复表面宏观几何形状的算法,实验结果验证了本文方法的可行性。关键词:3维重建;从明暗恢复形状(SFS);单幅图像;图像骨架;图像亮度统计;距离场约束99|220|1更新时间:2024-05-07
摘要:目的植物叶片形态复杂,在虚拟场景中很难真实表现。为了从信息量有限的单幅图像中恢复植物叶片的3维形状,本文基于从明暗恢复形状(shape from shading,SFS)的方法,利用亮度统计规律和植物形态特征恢复叶片的3维形状。方法在SFS的基础上,设计基于图像骨架的距离场偏置加强表面细节;针对SFS对恢复宏观几何形状的不足,提出根据图像亮度统计分布选取控制点控制表面宏观形状变化,并利用叶片中轴的距离场约束恢复宏观几何形状,每种方法对于表面宏观几何形状恢复的权重基于恢复的反射图和输入图像间的相似度设定;将表面细节添加到宏观几何形状上得到目标对象的3维形状。结果选取植物叶片图像进行实验,并与其他方法进行比较,实验结果表明本文方法增强了表面细节显示,并有明显的宏观几何形状变化。同时为了验证本文方法对其他物体表面细节恢复的适用性,分别对硬币和恐龙恢复表面细节,实验结果表明提出的增强表面细节的方法同样适用于其他物体。结论针对单幅植物叶片图像的3维重建,在SFS的基础上提出了根据骨架特征加强表面细节,根据图像亮度统计分布和叶片中轴距离场约束共同恢复表面宏观几何形状的算法,实验结果验证了本文方法的可行性。关键词:3维重建;从明暗恢复形状(SFS);单幅图像;图像骨架;图像亮度统计;距离场约束99|220|1更新时间:2024-05-07
计算机图形学
-
 摘要:目的多部位病灶具有大小各异和类型多样的特点,对其准确检测和分割具有一定的难度。为此,本文设计了一种2.5D深度卷积神经网络模型,实现对多种病灶类型的计算机断层扫描(computed tomography,CT)图像的病灶检测与分割。方法利用密集卷积网络和双向特征金字塔网络组成的骨干网络提取图像中的多尺度和多维度信息,输入为带有标注的中央切片和提供空间信息的相邻切片共同组合而成的CT切片组。将融合空间信息的特征图送入区域建议网络并生成候选区域样本,再由多阈值级联网络组成的Cascade R-CNN(region convolutional neural networks)筛选高质量样本送入检测与分割分支进行训练。结果本文模型在DeepLesion数据集上进行验证。结果表明,在测试集上的平均检测精度为83.15%,分割预测结果与真实标签的端点平均距离误差为1.27 mm,直径平均误差为1.69 mm,分割性能优于MULAN(multitask universal lesion analysis network for joint lesion detection,tagging and segmentation)和Auto RECIST(response evaluation criteria in solid tumors),且推断每幅图像平均时间花费仅91.7 ms。结论对于多种部位的CT图像,本文模型取得良好的检测与分割性能,并且预测时间花费较少,适用病变类别与DeepLesion数据集类似的CT图像实现病灶检测与分割。本文模型在一定程度上能满足医疗人员利用计算机分析多部位CT图像的需求。关键词:深度学习;计算机断层扫描(CT)图像;病灶检测;病灶分割;DeepLesion67|31|0更新时间:2024-05-07
摘要:目的多部位病灶具有大小各异和类型多样的特点,对其准确检测和分割具有一定的难度。为此,本文设计了一种2.5D深度卷积神经网络模型,实现对多种病灶类型的计算机断层扫描(computed tomography,CT)图像的病灶检测与分割。方法利用密集卷积网络和双向特征金字塔网络组成的骨干网络提取图像中的多尺度和多维度信息,输入为带有标注的中央切片和提供空间信息的相邻切片共同组合而成的CT切片组。将融合空间信息的特征图送入区域建议网络并生成候选区域样本,再由多阈值级联网络组成的Cascade R-CNN(region convolutional neural networks)筛选高质量样本送入检测与分割分支进行训练。结果本文模型在DeepLesion数据集上进行验证。结果表明,在测试集上的平均检测精度为83.15%,分割预测结果与真实标签的端点平均距离误差为1.27 mm,直径平均误差为1.69 mm,分割性能优于MULAN(multitask universal lesion analysis network for joint lesion detection,tagging and segmentation)和Auto RECIST(response evaluation criteria in solid tumors),且推断每幅图像平均时间花费仅91.7 ms。结论对于多种部位的CT图像,本文模型取得良好的检测与分割性能,并且预测时间花费较少,适用病变类别与DeepLesion数据集类似的CT图像实现病灶检测与分割。本文模型在一定程度上能满足医疗人员利用计算机分析多部位CT图像的需求。关键词:深度学习;计算机断层扫描(CT)图像;病灶检测;病灶分割;DeepLesion67|31|0更新时间:2024-05-07 -
 摘要:目的在高分辨率遥感图像场景识别问题中,经典的监督机器学习算法大多需要充足的标记样本训练模型,而获取遥感图像的标注费时费力。为解决遥感图像场景识别中标记样本缺乏且不同数据集无法共享标记样本问题,提出一种结合对抗学习与变分自动编码机的迁移学习网络。方法利用变分自动编码机(variational auto-encoders,VAE)在源域数据集上进行训练,分别获得编码器和分类器网络参数,并用源域编码器网络参数初始化目标域编码器。采用对抗学习的思想,引入判别网络,交替训练并更新目标域编码器与判别网络参数,使目标域与源域编码器提取的特征尽量相似,从而实现遥感图像源域到目标域的特征迁移。结果利用两个遥感场景识别数据集进行实验,验证特征迁移算法的有效性,同时尝试利用SUN397自然场景数据集与遥感场景间的迁移识别,采用相关性对齐以及均衡分布适应两种迁移学习方法作为对比。两组遥感场景数据集间的实验中,相比于仅利用源域样本训练的网络,经过迁移学习后的网络场景识别精度提升约10%,利用少量目标域标记样本后提升更为明显;与对照实验结果相比,利用少量目标域标记样本时提出方法的识别精度提升均在3%之上,仅利用源域标记样本时提出方法场景识别精度提升了10%~40%;利用自然场景数据集时,方法仍能在一定程度上提升场景识别精度。结论本文提出的对抗迁移学习网络可以在目标域样本缺乏的条件下,充分利用其他数据集中的样本信息,实现不同场景图像数据集间的特征迁移及场景识别,有效提升遥感图像的场景识别精度。关键词:场景识别;遥感图像;对抗学习;迁移学习;变分自动编码机(VAE)95|137|0更新时间:2024-05-07
摘要:目的在高分辨率遥感图像场景识别问题中,经典的监督机器学习算法大多需要充足的标记样本训练模型,而获取遥感图像的标注费时费力。为解决遥感图像场景识别中标记样本缺乏且不同数据集无法共享标记样本问题,提出一种结合对抗学习与变分自动编码机的迁移学习网络。方法利用变分自动编码机(variational auto-encoders,VAE)在源域数据集上进行训练,分别获得编码器和分类器网络参数,并用源域编码器网络参数初始化目标域编码器。采用对抗学习的思想,引入判别网络,交替训练并更新目标域编码器与判别网络参数,使目标域与源域编码器提取的特征尽量相似,从而实现遥感图像源域到目标域的特征迁移。结果利用两个遥感场景识别数据集进行实验,验证特征迁移算法的有效性,同时尝试利用SUN397自然场景数据集与遥感场景间的迁移识别,采用相关性对齐以及均衡分布适应两种迁移学习方法作为对比。两组遥感场景数据集间的实验中,相比于仅利用源域样本训练的网络,经过迁移学习后的网络场景识别精度提升约10%,利用少量目标域标记样本后提升更为明显;与对照实验结果相比,利用少量目标域标记样本时提出方法的识别精度提升均在3%之上,仅利用源域标记样本时提出方法场景识别精度提升了10%~40%;利用自然场景数据集时,方法仍能在一定程度上提升场景识别精度。结论本文提出的对抗迁移学习网络可以在目标域样本缺乏的条件下,充分利用其他数据集中的样本信息,实现不同场景图像数据集间的特征迁移及场景识别,有效提升遥感图像的场景识别精度。关键词:场景识别;遥感图像;对抗学习;迁移学习;变分自动编码机(VAE)95|137|0更新时间:2024-05-07
医学图像处理
-
 摘要:目的卫星视频作为新兴遥感数据,可以提供观测区域高分辨率的空间细节信息与丰富的时序变化信息,为交通监测与特定车辆目标跟踪等应用提供了不同于传统视频视角的信息。相较于传统视频数据,卫星视频中的车辆目标分辨率低、尺度小、包含的信息有限。因此,当目标边界不明、存在部分遮挡或者周边环境表观模糊时,现有的目标跟踪器往往存在严重的目标丢失问题。对此,本文提出一种基于特征融合的卫星视频车辆核相关跟踪方法。方法对车辆目标使用原始像素和方向梯度直方图(histogram of oriented gradient,HOG)方法提取包含互补判别能力的特征,利用核相关目标跟踪器分别得到具备不变性和判别性的响应图;通过响应图融合的方式结合两种特征的互补信息,得到目标位置;使用响应分布指标(response distribution criterion,RDC)判断当前目标特征的稳定性,决定是否更新跟踪器的表征模型。本文使用的相关滤波方法具有计算量小且运算速度快的特点,具备跟踪多个车辆目标的拓展能力。结果在8个卫星视频序列上与主流的6种相关滤波跟踪器进行比较,实验数据涵盖光照变化、快速转弯、部分遮挡、阴影干扰、道路颜色变化和相似目标临近等情况,使用准确率曲线和成功率曲线的曲线下面积(area under curve,AUC)对车辆跟踪的精度进行评价。结果表明,本文方法较好地均衡了使用不同特征的基础跟踪器(性能排名第2)的判别能力,准确率曲线AUC提高了2.9%,成功率曲线AUC下降了4.1%,成功跟踪车辆目标,不发生丢失,证明了本文方法的先进性和有效性。结论本文提出的特征融合的卫星视频车辆核相关跟踪方法,均衡了不同特征提取器的互补信息,较好解决了卫星视频中车辆目标信息不足导致的目标丢失问题,提升了精度。关键词:目标跟踪;卫星视频;核化相关滤波;特征融合;车辆跟踪102|146|1更新时间:2024-05-07
摘要:目的卫星视频作为新兴遥感数据,可以提供观测区域高分辨率的空间细节信息与丰富的时序变化信息,为交通监测与特定车辆目标跟踪等应用提供了不同于传统视频视角的信息。相较于传统视频数据,卫星视频中的车辆目标分辨率低、尺度小、包含的信息有限。因此,当目标边界不明、存在部分遮挡或者周边环境表观模糊时,现有的目标跟踪器往往存在严重的目标丢失问题。对此,本文提出一种基于特征融合的卫星视频车辆核相关跟踪方法。方法对车辆目标使用原始像素和方向梯度直方图(histogram of oriented gradient,HOG)方法提取包含互补判别能力的特征,利用核相关目标跟踪器分别得到具备不变性和判别性的响应图;通过响应图融合的方式结合两种特征的互补信息,得到目标位置;使用响应分布指标(response distribution criterion,RDC)判断当前目标特征的稳定性,决定是否更新跟踪器的表征模型。本文使用的相关滤波方法具有计算量小且运算速度快的特点,具备跟踪多个车辆目标的拓展能力。结果在8个卫星视频序列上与主流的6种相关滤波跟踪器进行比较,实验数据涵盖光照变化、快速转弯、部分遮挡、阴影干扰、道路颜色变化和相似目标临近等情况,使用准确率曲线和成功率曲线的曲线下面积(area under curve,AUC)对车辆跟踪的精度进行评价。结果表明,本文方法较好地均衡了使用不同特征的基础跟踪器(性能排名第2)的判别能力,准确率曲线AUC提高了2.9%,成功率曲线AUC下降了4.1%,成功跟踪车辆目标,不发生丢失,证明了本文方法的先进性和有效性。结论本文提出的特征融合的卫星视频车辆核相关跟踪方法,均衡了不同特征提取器的互补信息,较好解决了卫星视频中车辆目标信息不足导致的目标丢失问题,提升了精度。关键词:目标跟踪;卫星视频;核化相关滤波;特征融合;车辆跟踪102|146|1更新时间:2024-05-07
遥感图像处理
- 地址:北京市海淀区北四环西路19号中科院电子所主楼223室 邮编:100190
- 联系电话:010-58887035/58887030/58887418 Email:jig@aircas.ac.cn
- 技术支持由北京北大方正电子有限公司提供 京ICP备05080539号-4
 京公网安备11010802024621
京公网安备11010802024621 - 本系统建议在Chrome、 IE9+ 以上版本浏览器阅读本站内容,360浏览器请切换至极速模式
- Cookies帮助我们提供服务并提供个性化体验。使用本网站,即表示您同意我们使用Cookies

0